



什么是深度强化学习
深度强化学习(Deep reinforcement learning)是机器学习的子领域,利用深度学习模型来解决强化学习中的任务。
就深度学习而言,其也是机器学习的一个分支,例如用来图像分类,就是实现一个函数在输入图片后预测输出分类标签,这个函数有一个可调的参数模型,在初始条件下,这些参数是随机值,所以不管输入什么,输出都是一个随机标签。然后通过数据集对模型迭代训练,不断调整参数来逼近真实标签。
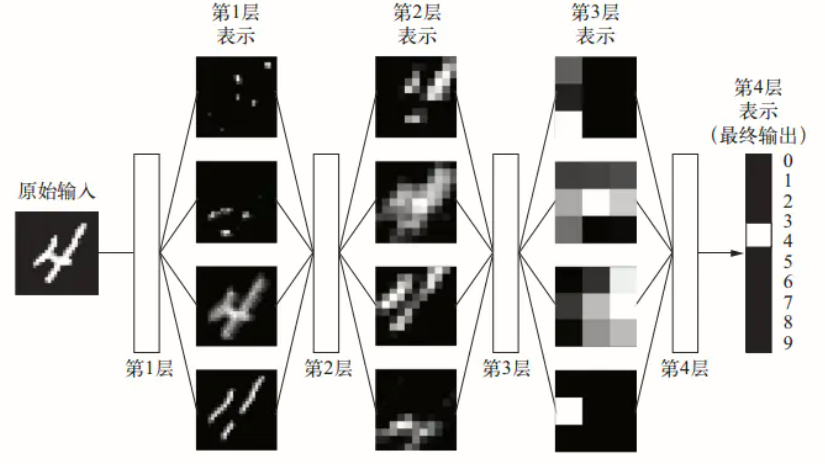
深度神经网络所以大受欢迎,因为大多时候其能够最精确地描述给定任务的参数模型。这得益于其数据表示方法,在深度神经网络中存在许多的隐藏层,这些层对输入的数据进行分层学习,即将数据表示为更简单数据的组合。
对于强化学习更重要的是学会如何做出动作决策,完成既定的控制任务。其中我们可以自由的选择有效算法来实现控制任务。深度神经网络能够有效地表达复杂数据模型,这就是为深度强化学习为什么大受欢迎。
从图像处理到控制任务的额外复杂度就是时间,而在图像处理中通常不考虑时间的连续性问题。在控制任务中每一条数据都是时空上的连续,且后面的数据往往受前面数据的影响。
通常的图像处理任务是监督学习,模型训练过程需要提供一系列的图片与对应标签,模型开始时进行随机猜测,并进行迭代校正,直到学习到图像中与适当标签相对应的特征。
与之相反,强化学习并不知道每一步怎么做是正确的,只是知道最终目标和规则。在训练过程中,如果它完成了既定任务,我们基于奖励,如果违反规则,则给予惩罚。整个训练过程是在模拟器中完成,让模型在不断尝试中学习如何避免失败与惩罚,尽量最大化奖励。
动态规划与蒙特卡洛
动态规划通过将复杂的高级问题分解为越来越小的子问题来解决,直到得到一个无需进一步分解即可解决的简单子问题。但是在强化学习中我们很难将问题如此分解,经常遇到可能包含一些随机情况,不能完全应用动态规划。
蒙特卡洛方法本质上是从环境中随机抽样,通过不断的试错来了解环境来解决问题。
强化学习基础框架
强化学习标准模型包括:智能体、环境、动作空间、状态空间、奖励。
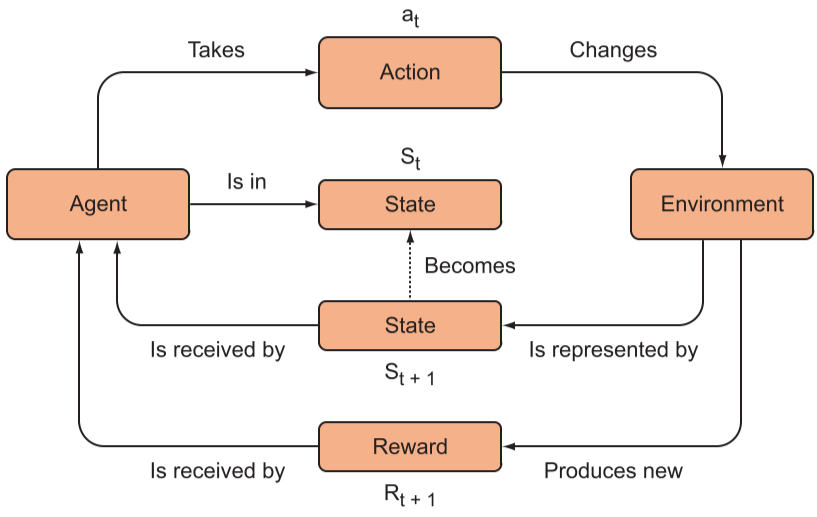
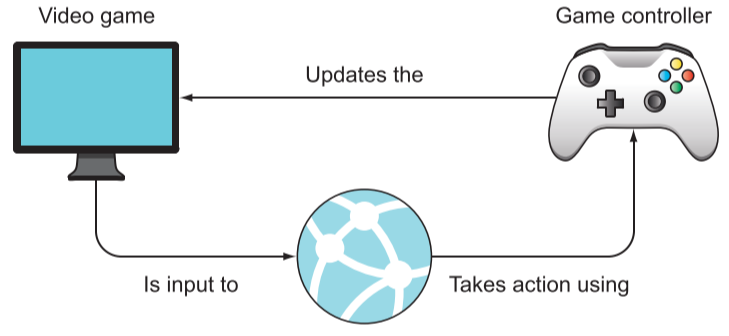
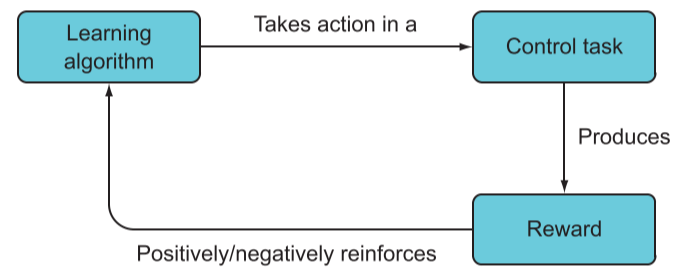
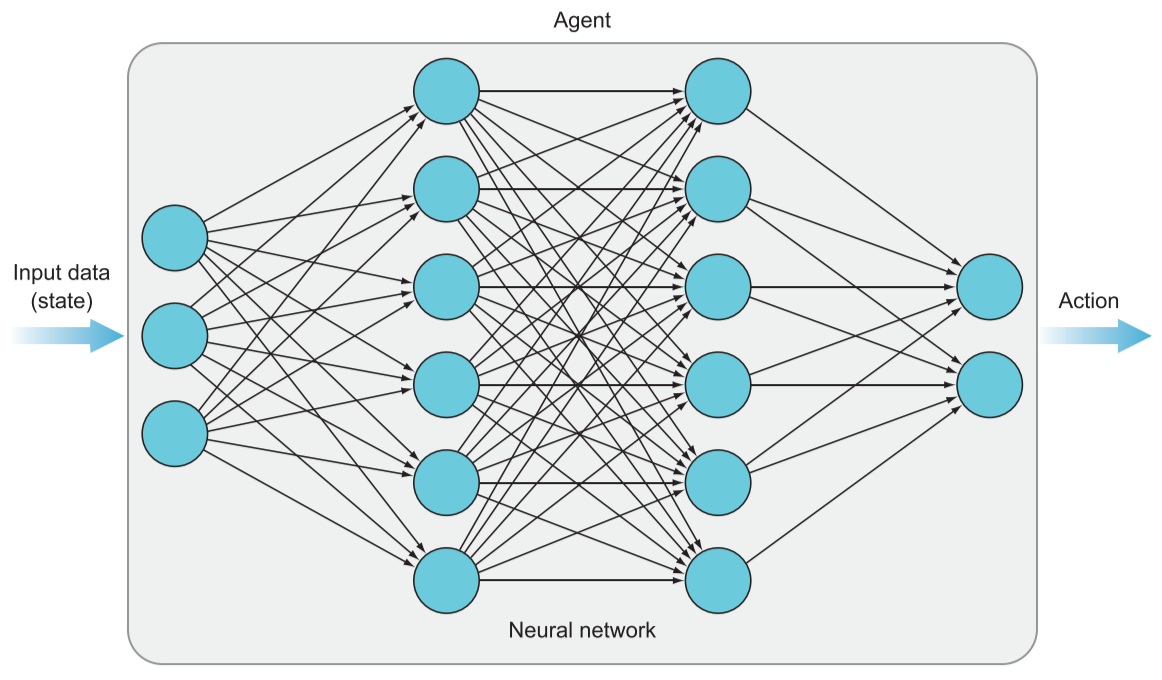
从智能体的视角来解释框架,首先智能体从环境中获取所需的状态空间变量输入自身的模型中,输出动作空间中的一个动作,改变环境并收到一个奖励反馈(包括正或负)。
马尔可夫决策过程
多老虎机问题
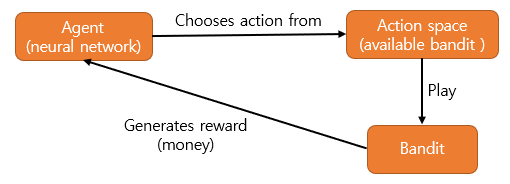
假设现在有四台老虎机,不需要投币,只需要摇动摆臂就能获得 0 到 10 元的随机奖励,但是每台的平均奖励值是不同的,如果我们可以玩的次数有限,如何获取最大奖励。

将问题可以简化为,我们有 4 个可能的动作空间(action space),即选择哪一个老虎机来玩。当我们做出决定并动作(action)后,收到一个奖励反馈(reward)。
我们的游戏策略应该是,首先尝试不同的老虎机玩几把,观察返回的奖励分布,之后选择平均奖励最高的老虎机一直玩。根据之前玩的经验,这时我们会有一个预期过程,即当前的动作会获得多少奖励的预期。在数学上,我们将这个预期过程建立为预期函数Qk(a),也称为价值函数Q。
以上过程可以分为探索和开发两个阶段。探索时,我们只是随机的选取动作,并观察奖励,而开发时,则是根据先前经验选择可能最多的奖励动作来执行。
广告投放问题
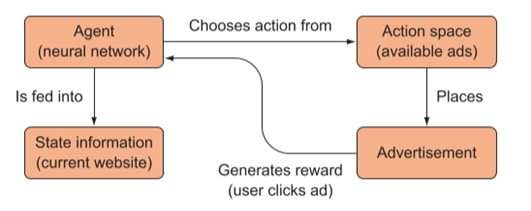
假设你是某购物网站的策划,你有许多不同类型的产品,你希望在不同的页面投放一个广告来吸引客户点击。
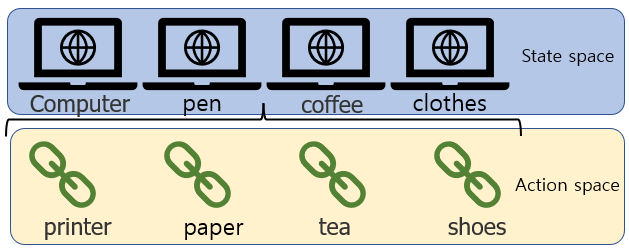
问题可以简化为,在不同的状态空间(state spaces,不同网站)中执行动作空间(action space,不同广告)的某个动作,并获取奖励反馈(reward,点击量)。
意味着,状态空间中每个状态和动作空间中的每个动作都会有其单独的关系,我们称为状态-动作对(state-action pair (s, a))。也就是说,状态-动作对的数量是关于状态空间和动作空间所倍数增长的,这也是为什么我们需要用深度网络来描述模型了。
马尔可夫性质
从前面的定义和例子中可以看到,深度神经网络的输入是当前状态,根据当前的状态产生预期奖励并选择最佳动作。这是强化学习中的一个重要属性,称为马尔可夫属性。表现出马尔可夫属性的任务被称为马尔可夫决策过程(Markov decision process,MDP)。
对于 MDP 而言,当前状态就包含足够的信息来选择最佳动作以最大化未来的奖励。MDP 模型极大地简化了 RL 问题,因为我们不需要采取考虑到所有以前的状态或动作,我们只需要分析当前状态。
当然不是所有的任务天然具有马尔可夫性质,但是我们还是可以通过更多信息加入当前状态,进而有效地诱导出马尔可夫性质。例如马里奥游戏中我们可以将最近的5帧认为是当前状态,学习到怪物是在靠近马里奥还是远离,从而做出更有效判断。
Deep Q-learning Network(DQN)
Q-learning
传统的 Q-learning 的主要思想是算法预测一个状态-动作对的值,然后你将这个预测与观察到的奖励进行比较,并更新算法的参数,以便下次做出更好的预测。其中 Q-learning 并不是预测在采取特定行动后将获得的奖励,它是在预测期望值(期望奖励),这是我们在一个状态下采取动作所获得的长期平均奖励。
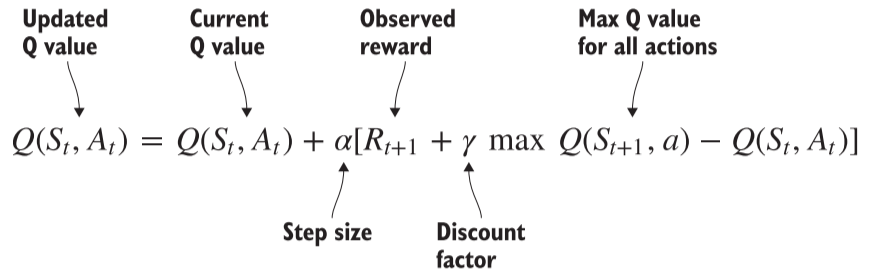
参数 α 称为学习率,它控制着算法学习每一步的速度,小的值意味着每次进行一小步更新。
参数 γ 称为折现率,它控制智能体在做出决策时对未来奖励的折扣程度。也就是认为当前的奖励和未来奖励的相等性比例,例如现在得到100元和下个月得到200元具有相等性,则折现率为 100/200=0.5。
Deep Q-learning Network
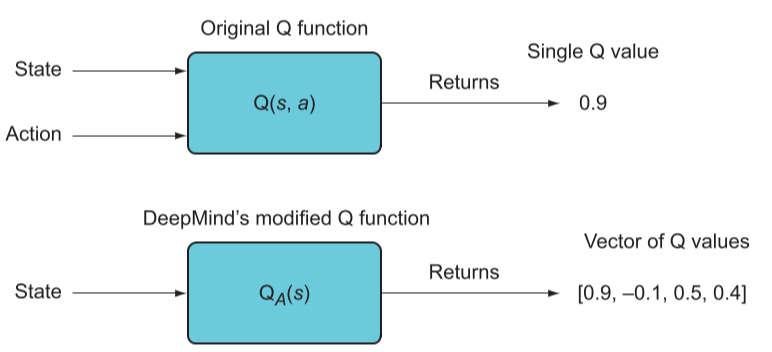
而在 DQN 简化了原来的 Q-learning 接受一个状态-动作对并返回该状态-动作对的值,直接接受一个状态并返回该状态-动作对的值向量,
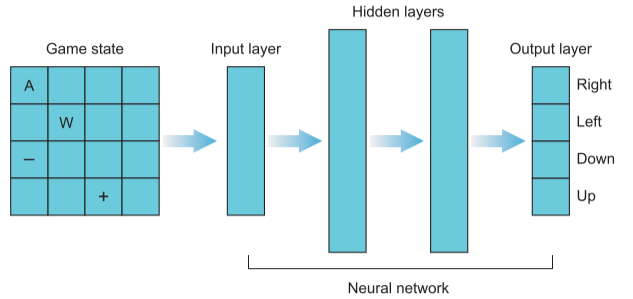
其网络结构如下,其输入层是状态的一维展开,而输出层则是对应的状态-动作空间的值。
经验回放
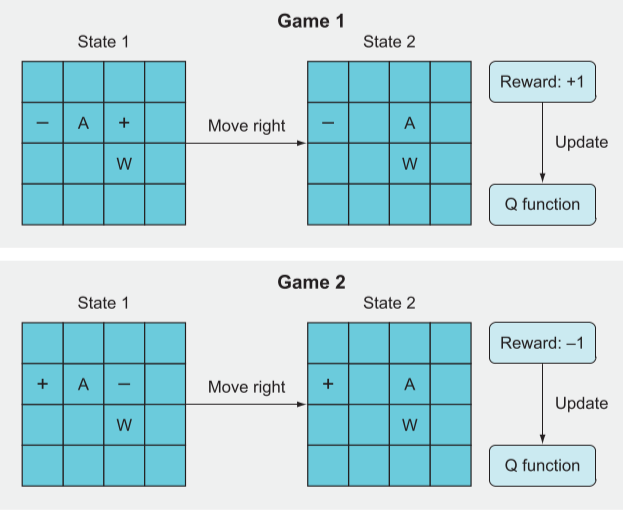
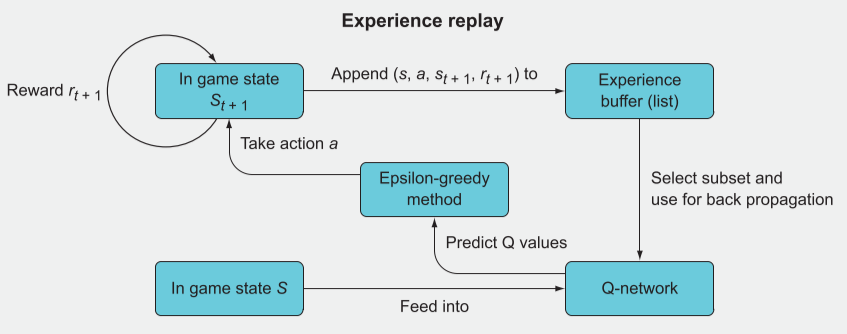
在训练 DQN 时,如果我们将每一次动作直接进行训练,我们会发现一个问题,当环境状态变化时,相同的动作在前后所获得的奖励相反,这可能会覆盖之前的训练,DQN 变的疑惑。所以我们通常采取经验回放法来训练 DQN
经验回放法就是实现批量更新,流程为:
- 在状态s,采取行动a,观察新状态st+1,奖励rt+1。
- 这时不进行训练,而是将(s, a, st+1, rt+1)作为经验元组储存在列表中。
- 将每个经验存储在此列表中,直到将列表填充到特定长度。
- 当经验列表被填满后,随机选择一个子集。
- 遍历子集并计算目标 Q 值(Y)与当前 Q 值(X)。
- 使用 X 和 Y 批量训练。 对后续的数据则进行压栈处理。
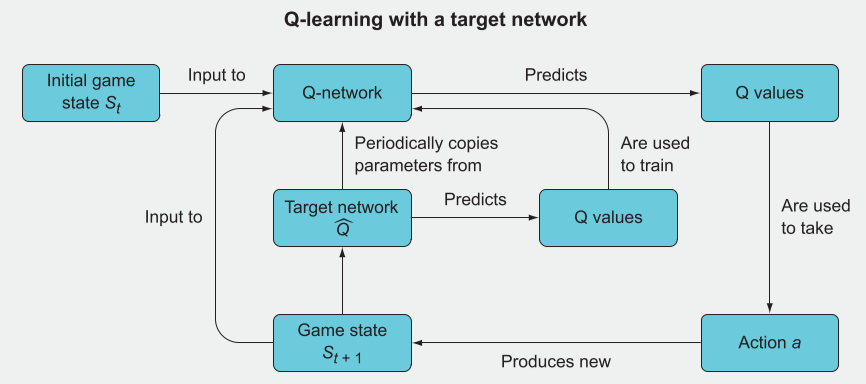
提高训练稳定性
如果在每次动作后都对 DQN 网络进行更新,会发现损失图极为不稳定比较震荡,这是由于奖励是稀疏的,而且有时候动作与奖励是相反的,预测的 Q值 永远不会稳定在一个合理的值上。
采用一种延迟的方法来实现训练的稳定,流程如下:
- 共同初始化 Q-network 和 Target network 为相同参数。
- 使用带有 Q-network 的 Q值 来选择动作 a。
- 观察奖励和新状态 rt+1,St+1。
- Target network 的 Q值 将设置为 rt+1(游戏结束) 或 rt+1 + γmaxQθr(St+1)
- 利用 Target network 的 Q值 对 Q-network 进行反向传播,更新网络。
- 每 C 次迭代,将 Target network 的参数等于 Q-network 的参数。
策略梯度法(Policy gradient methods)
在 DQN 中输入状态值(state),输出 Q值,再基于策略选择动作(action)。
将神经网络作为策略网络
现在希望智能体的网络能够直接输出动作,将策略的选择也整合到网络中形成策略网络,更准确的说是,将返回动作的离散概率分布,进而从这个分布中采样来选择动作。最有效动作将最有可能从随机抽样中被选中,因为它们被分配了最高概率。

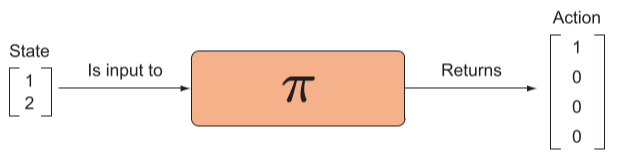
随机策略网络
在随机性策略网络中,输出是是一个动作向量,表示概率分布。当然,在模型初始化的时候,每个动作概率应该是近似相等的。
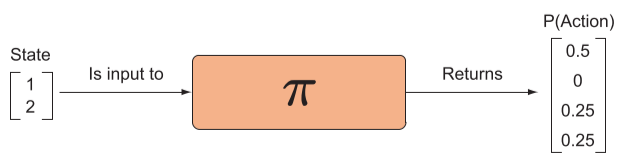
当环境稳定,即状态和奖励的分布是恒定的,也可使用确定性策略,将期望概率分配给单个结果的分布。但是即使环境稳定,我们也很少采用这个,因为它无法正确的探索,难以建立神经网络模型。
建立目标函数
对于 DNQ 网络来说,我们采用了 MSE 损失函数来优化网络,用的是 Q值 和 期望Q值,这与通常的监督学习网络训练方法相同,都是基于预测值与真实值的关系。当进行前向计算,网络参数是固定的,而输入参数是变化的。当进行反向传播时,相对于固定输入改变网络参数,以找到一组参数来优化我们目标函数。
但是对于策略网络则是不同,其输出的是动作空间的概率分布,在采取动作更新之后,没有明显的方法来映射我们观察到的奖励。所以在策略网络中的训练形式不同于 DQN 。
在我们执行了某个动作后,发现获得奖励,意味着我们需要加强该动作在该状态下的概率,因为总体概率之和为1,所以加强其中一个的概率,则其他的将被减弱。
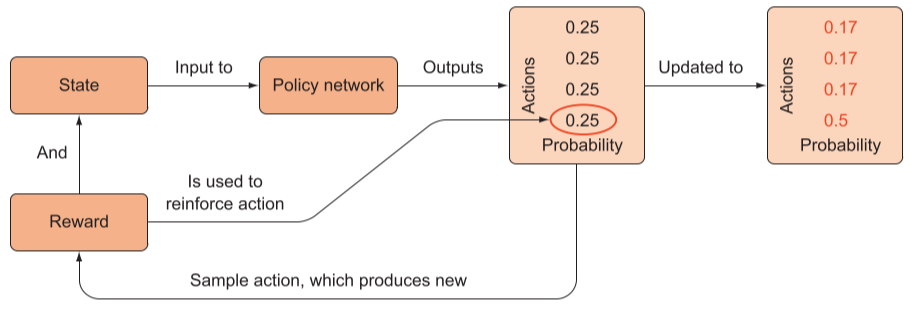
其目标函数我们表达为:。意思是在某状态下,调整网络参数 来加强动作 a 的概率。也即是最大化 。
一般在 Pytorch 中我们习惯将目标函数最小化,所以将其变形为:。
在数学优化时 限制了 范围在 0-1 之间,当数值接近 1 或 0 时,变化幅度小。通常我们将其处理为:。这样 就获得了极大的动态范围,并且可以运用对数运算法。
贡献分配(Credit assignment)
对于整场游戏而言,有许多个动作,但动作之间的重要程度是不同的。通常我们认为,越是接近终点的动作越是重要。所以需要对损失函数加以折扣系数,定义为:
- 是折扣系数,下标 t 将取决于时间步长,比最近的动作更折扣更远的动作。
- 是时间步 t 的总奖励,是从开始到结束收集的奖励之和。
训练模型
在策略网络训练时,输入的是一整轮的数据,即智能体开始执行动作到结束游戏的一轮,再通过更新参数来训练策略网络以最小化目标(即损失)函数。
- 计算每个时间步实际采取的动作的概率。
- 将概率乘以折扣回报(奖励的总和)。
- 使用这个概率加权回报来反向传播并最小化损失。
Distributed Advantage Actor-critic 模型(DA2C)
DA2C 结合了 DQN 的在线学习优势,和策略网络的直接输出动作概率分布优势。在多领域为 state-of-the-art 结果。
结合 DQN 和 策略
DQN 能够直接从奖励中在线学习,学会了预测奖励,采用高预测的动作。
策略网络则是通过强化获得积极奖励的行为,抑制获得负面奖励的行为。
损失函数
结合两者的优点,以策略网络为基础,通过加入 DQN 的特性来提高整体的稳健性:
- 通过更加频繁的模型更新来提高样本的效率
- 减少用于更新模型的奖励的方差
这些问题是相关的,因为奖励方差取决于样本量(更多样本产生更少的方差)。 DA2C 背后的想法是使用 DQN 来减少用于训练策略的奖励方差。 也就是说,不是最小化包含直接参考观察到的奖励 R 的强化损失,而是添加一个基线值,使得现在的损失为:
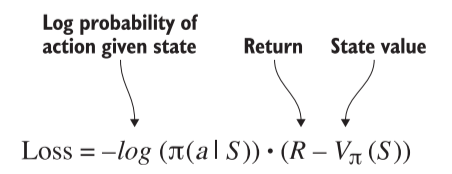
这里, 是状态 的值,它是状态值函数。,被称为优势,是动作相对于预期的优势量。
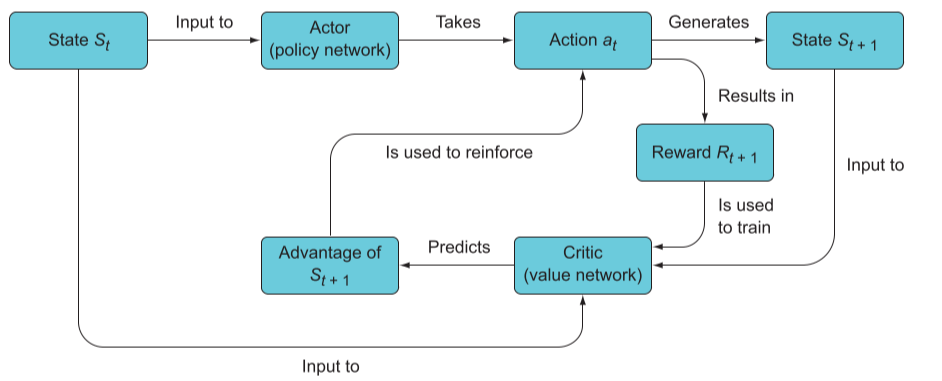
模型建立
- 首先,行动者预测最佳的动作,并产生新的状态
- 批评者预测旧状态和新状态之间的优势,该优势用于训练行动者。
- 行动者执行动作后的奖励来训练批评者
进化算法(Evolutionary algorithms)
以往我们通常依赖于神经网络来近似 Q 函数与策略函数,通过与环境交互、收集经验,然后使用反向传播来提高神经网络的准确性。但是该过程中,我们需要仔细地调整几个超参数,但不能保证模型的成功。而且要求损失函数具有可微性。
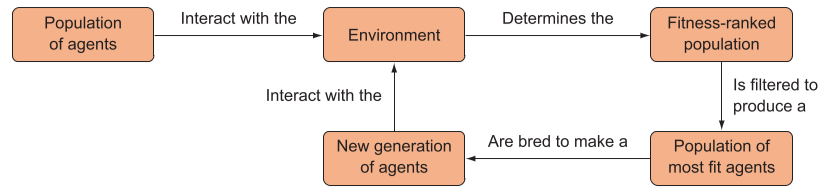
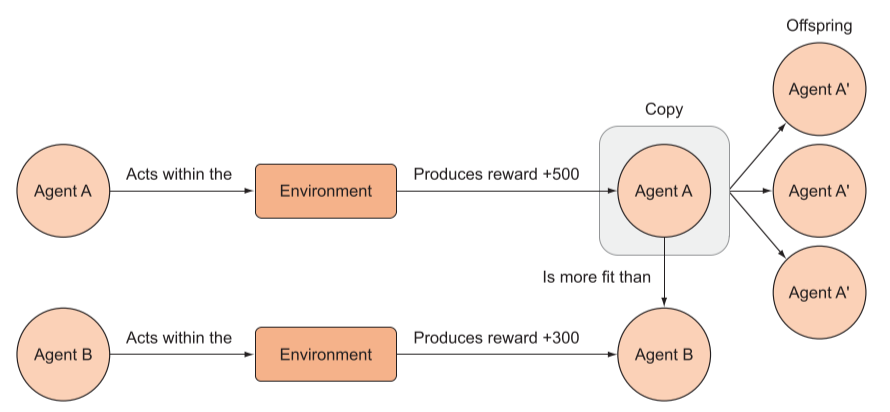
而进化算法用不同的参数衍生出多个智能体,观察哪一个做的最好,然后培育这个最好的,后代继承其特征继续训练。
遗传算法流程
- 生成随机参数向量的100个智能体
- 在游戏中对模型迭代,记录奖励来评估个体的适合度
- 按照相对适合度加权,从种群中随机抽取一对对个体,创建繁殖种群
- 繁殖种群中的个体交配产生后代,形成相同规模的智能体
- 交配过程可以是一对个体之间的参数进行简单的相互交换
- 不断迭代种群,并加入一些随机突变,确保遗传多样性
进化算法的优缺点
- 往往比基于梯度的方法更具探索性
- 遗传算法中的智能体不会推向任何方向。每一代中产生很多智能体,并且它们之间存在很多的随机变化,彼此具有不同的策略。
- 需要大量的样本进行训练更新,效率远低于神经网络
评论区