



SparkFun 的 Mosaic-X5 Triband GNSS RTK Breakout 为用户提供了同时使用L1、L2和L5频段的最简单方式。它内置了 Septentrio 的高精度 GNSS 接收器 mosaic-X5,这是一个超低功耗、多频段、多星座接收器,能够以高更新率提供厘米级精度。
Mosaic-X5支持多个全球导航卫星系统,包括 GPS、GLONASS、Beidou、Galileo和NavIC,具备实时动态(RTK)能力,可作为基站或漫游器使用,实现极高的位置精度。此外,mosaic-X5 还具备内置网络服务器,通过USB接口访问,兼容第三方软件,无需编程即可操作,提供了数据记录和PPS输出功能。

参数指标如下:
- RTK Accuracy(使用固定基站的校正数据)
- Horizontal: 0.6cm (±0.5ppm)
- Vertical: 1cm (±1ppm)
- DGNSS Accuracy(差分全球导航卫星系统,通过比较两个接收器的信号来减少误差)
- Horizontal: 40cm
- Vertical: 70cm
- SBAS Accuracy(基于卫星的增强系统,通过额外的卫星信号和地面站提供的校正信息)
- Horizontal: 60cm
- Vertical: 80cm
- Standalone Accuracy(单独使用GNSS接收器进行定位,不依赖外部校正信号)
- Horizontal: 1.2m
- Vertical: 1.9m
- Time to Fix
- Cold Start: < 45s
- Warm: < 20s
- Reacquisition: 1s
- Timing Precision: 5ns
- Update Rate: 100Hz
- Latency: < 10ms
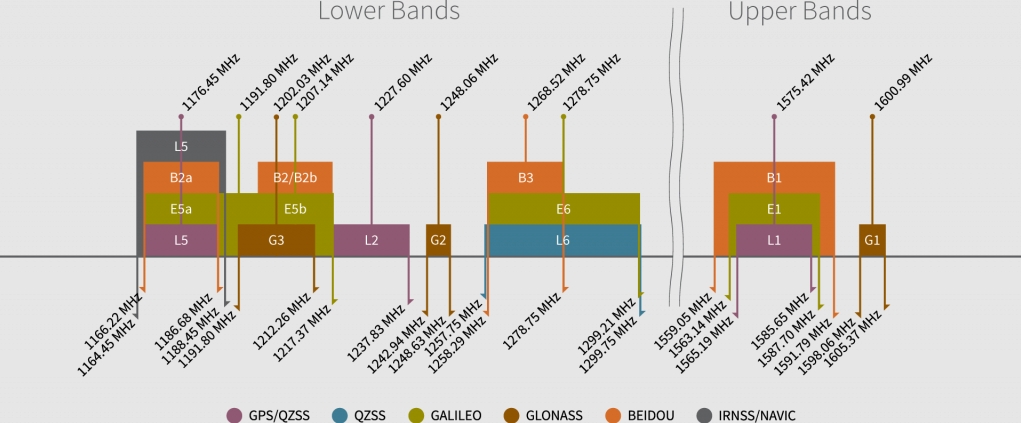
- GNSS Support
- GPS: L1C/A, L1PY, L2C, L2P, L5
- GLONASS: L1CA, L2CA, L2P, L3 CDMA
- Beidou: B1I, B1C, B2a, B2b, B2I, B3
- Galileo: E1, E5a, E5b, E5 AltBoc, E6
- QZSS: L1C/A, L1 C/B, L2C, L5
- NavIC: L5
- SBAS: Egnos, WA
连接配置方法
Mosaic-X5 提供了多样的连接配置方法,包括:USB-C连接后通过网页配置、USB-C连接后通过Rxtool软件配置、USAT串口指令配置。其中最常用的是可视化的网页配置,最为简单。接下来介绍网页配置方法。
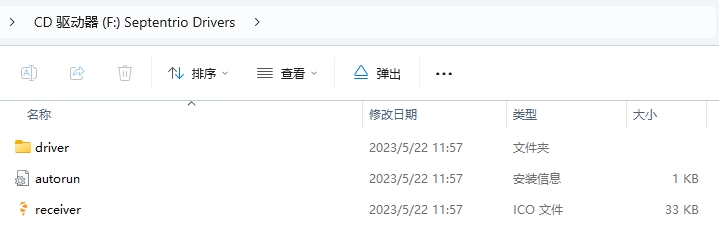
当 Mosaic-X5 模块最初连接到计算机时,该板将初始化为 USB 大容量存储设备。其中包括了重要的 USB 驱动固件。
安装 USB 驱动程序后,此接口将支持 Ethernet-over-USB,默认情况下,Win下不允许接收器通过 USB 访问 Internet,而 Ubuntu 下则可以直接访问,不需要安装任何驱动程序。
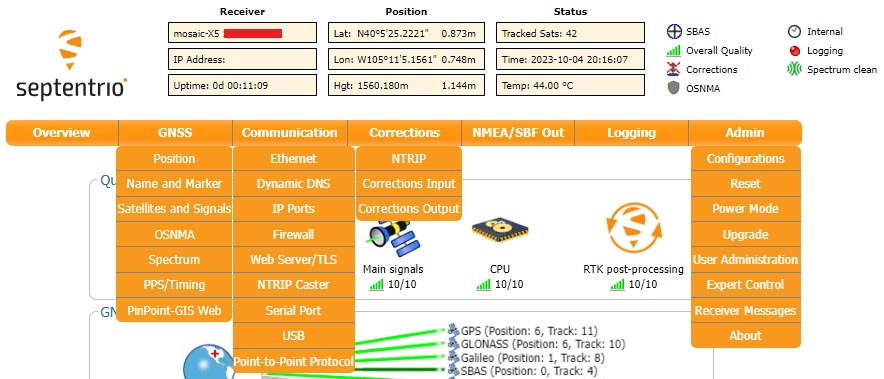
完成驱动安装后,通过网页即可访问分配给 Ethernet-over-USB 接口的 IP 地址:192.168.3.1。这里可视化的包含了所有当前状态信息与需要配置选项。
共享 Internet 访问
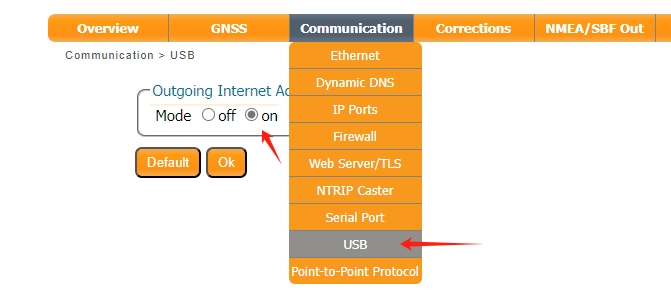
默认情况下,mosaic-X5 GNSS 接收器未配置为通过 USB 接口访问互联网。为了向 RTK 网络(如 NTRIP)接收或投射 RTK 校正,用户需要启用功能。
需要使用 Web 界面启用导航选项卡的 Communication > USB 下拉菜单。将 Outgoing Internet Access Over USB 状态选择为 on,并保存设置。
然后通过允许在计算机上进行 Internet 共享。执行此操作的过程取决于操作系统。
Windows
通过 控制面板 -> 网络和 Internet -> 网络连接。并将当前的网络分享分享给USB网口。
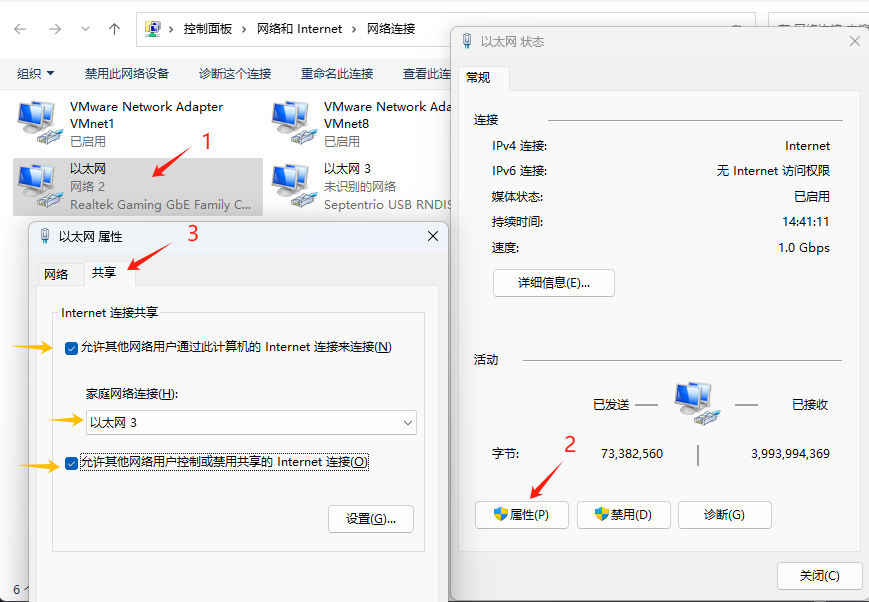
启用网桥后,接收方将从计算机的 DHCP 服务器接收其 IP 地址。根据路由表,可能无法再通过其默认 IP 地址 (192.168.3.1) 访问模块。
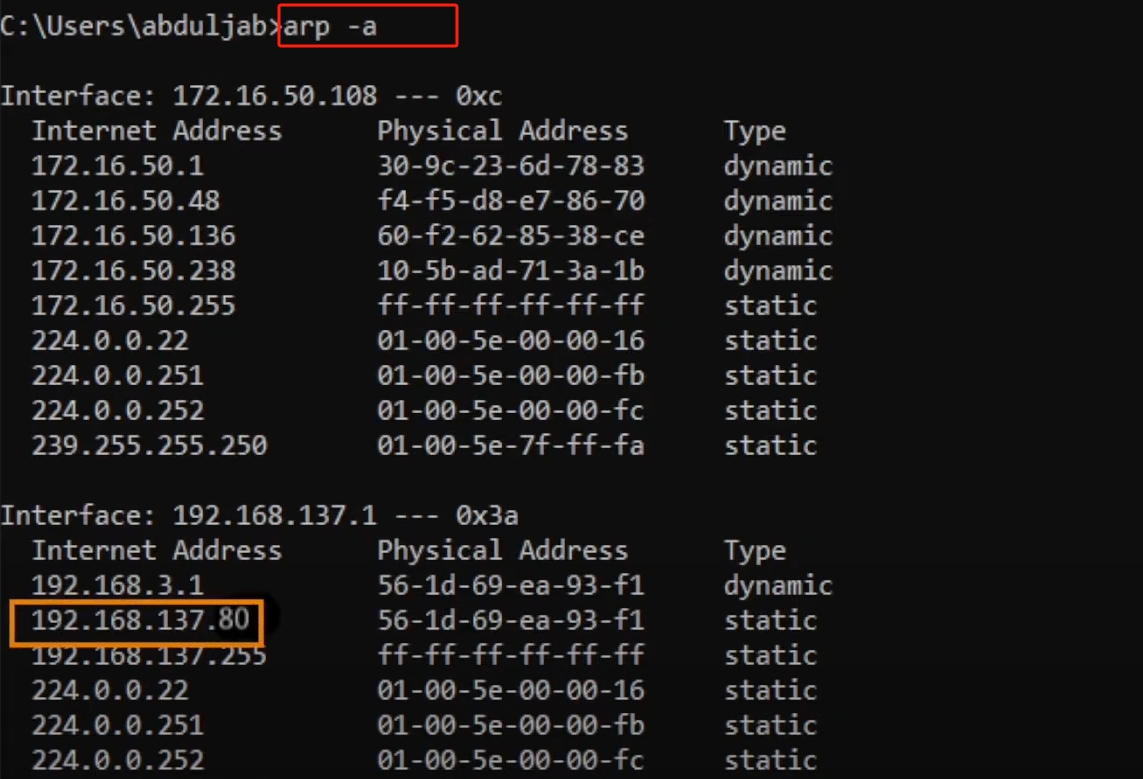
接下来通过 CMD终端输入 arp -a,找到分配到的IP地址,并再次通过网页访问。注意,如果在分享后还是相同的IP地址 (192.168.3.1) ,则可能没有成功。
Ubuntu
在 Ubuntu 中,打开 网络,选择 USB以太网后的小齿轮,将 IPv4 下的方式配置为 与其他计算机共享。其他操作与上面相同。

RTK 校正设置
这里设置通过互联网接收来自第三方服务的 RTK 校正。
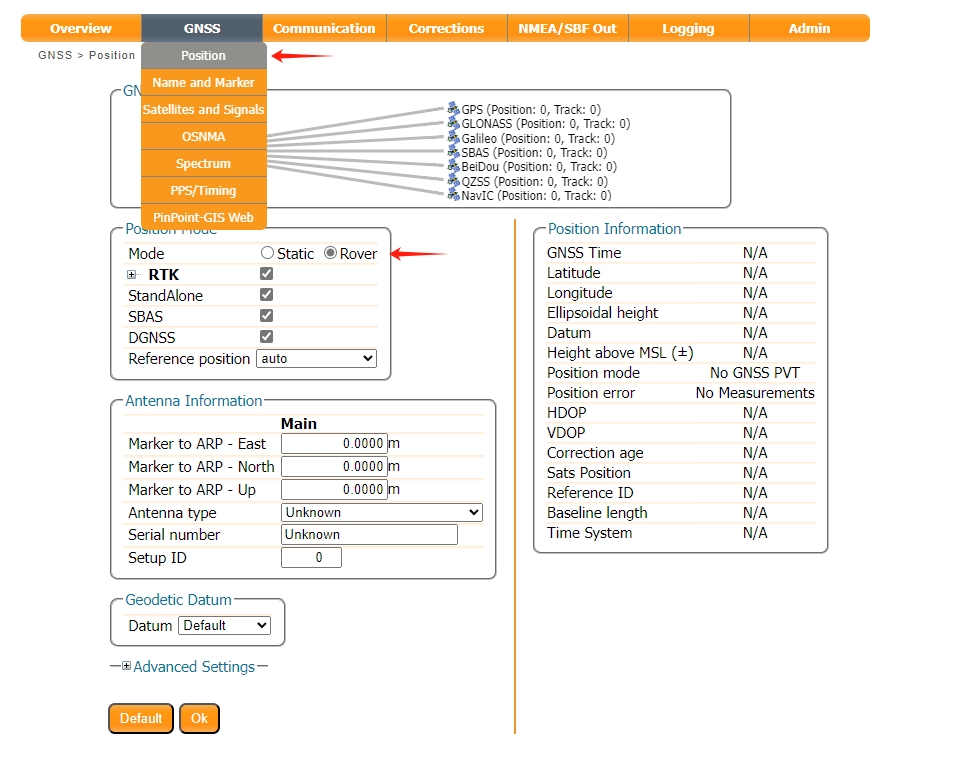
首先将 GNSS -> Position -> Position Mode 设置为 Rover
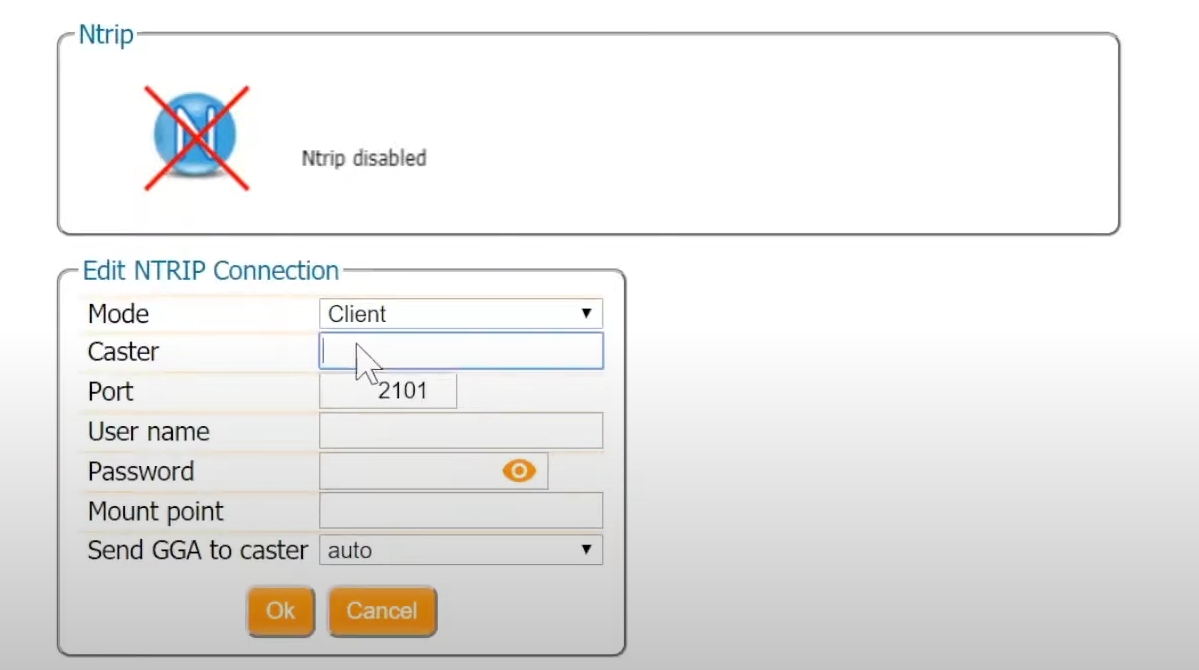
在将 Corrections -> NTRIP 中新建 New NTRIP clinet,正确填写保存后即可使用
启用 L5 频段
mosaic-X5 能够使用该频段。不过,在 GPS 网络中,该服务尚未完全投入使用,需要对 mosaic-X5 进行配置,以启用该频段。
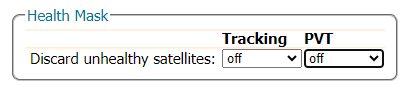
首先,通过下拉菜单导航到 Admin > Expert Control > Control Panel > Navigation > Receiver Operation > Masks。找到 Health Masks 框,然后为“Tracking ”和“Tracking ”选项配置为off。
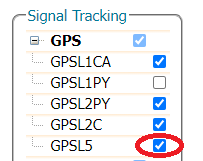
再将 Navigation > Advance User Settings > Tracking > Signal Tracking,找到 Signal Tracking,启动 GPSL5
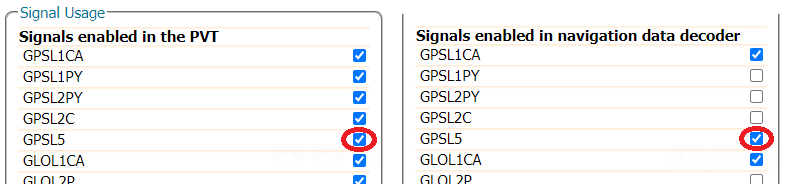
最后将 Navigation > Advance User Settings > PVT > Signal Usage,中的GPSL5勾选上。
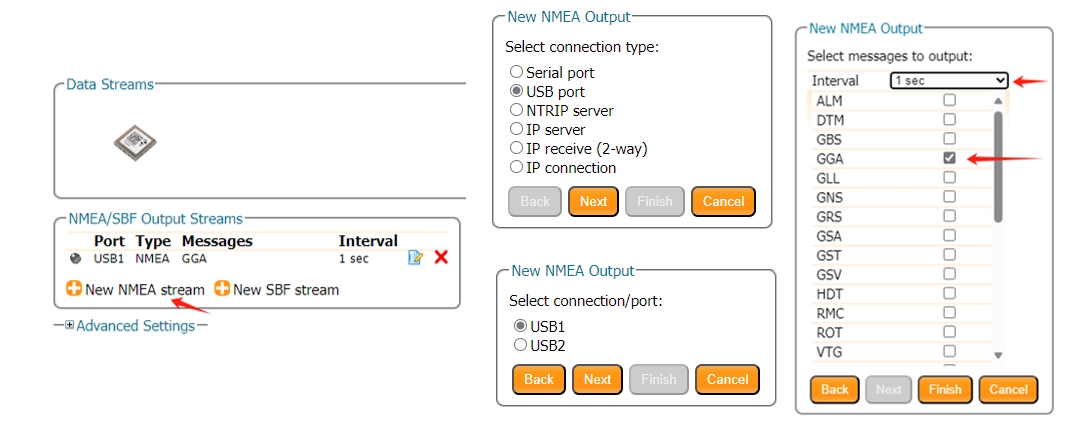
定位 NMEA 信息输出
默认情况下是没有输出的,需要手动配置。Mosaic-X5 GPS 提供了多种的输出途径与输出格式,
- 4 个 UART(LVTTL,高达 4 Mbps)
- USB-C 端口 (2.0, HS)
- SDIO(大容量存储)
配置选项在 NMEA/SBF Out 中配置,通过 New NMEA stream,添加。
PPS输出
Mosaic-X5 GPS生成PPS信号的机制是基于其高精度的时间同步功能。PPS(Pulse Per Second)信号是一个精确到秒的时间标记,用于指示每个GPS时间秒的开始。
Mosaic-X5利用接收到的卫星信号来校准其内部时钟,确保PPS信号与全球标准时间(UTC)高度同步。这个过程允许设备提供极高精度的时间信号,用于各种需要精确时间同步的应用,如数据采集、网络同步等。
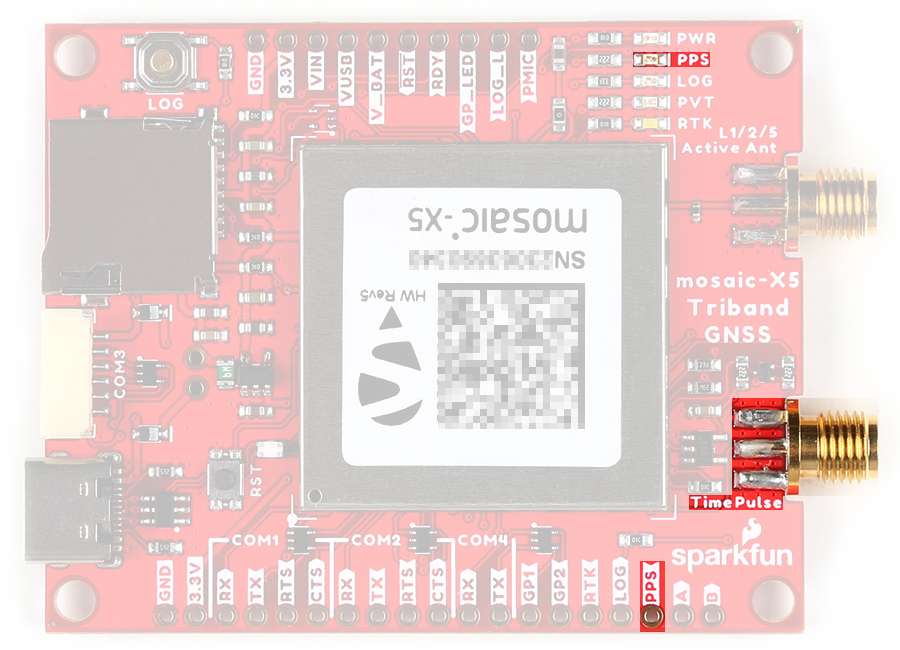
从模块来看,PPS输出信号的逻辑电平为1.8V。但是,为了方便用户,我们添加了一个缓冲器,并在三频 GNSS RTK 分线器上将信号的逻辑电平提高到 3.3V。此 3.3V 信号输出可通过 SMA 连接器和引脚访问。该信号还连接到 LED,用作视觉指示器。
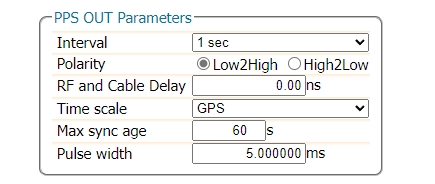
此外,我们还可以在 GNSS > PPS/Timing ,中配置详细参数,比如提高频率等。
ROS包安装与设置
ROSaic 是 Septentrio 维护的一个ROS包,用于支持其GPS接收器与ROS的集成,就包括了mosaic-X5。
安装依赖:
sudo apt install ros-$ROS_DISTRO-nmea-msgs ros-$ROS_DISTRO-gps-common
sudo apt install libboost-all-dev
sudo apt install libpcap-dev
sudo apt install libgeographic-dev
安装ROS包:
mkdir -p ~/septentrio/src
cd ~/septentrio/src
git clone https://github.com/septentrio-gnss/septentrio_gnss_driver
rosdep install . --from-paths -i
catkin_make
echo "source ~/septentrio/devel/setup.bash" >> ~/.bashrc
执行:
roslaunch septentrio_gnss_driver rover.launch param_file_name:="gnss"
评论区