



Velodyne VLP16 是目前较为可靠的小型3维激光雷达,具有100米的远量程测量距离,每秒高达30万个点数据输出,±15°的垂直视场,360°水平视场扫描。
与电脑连接
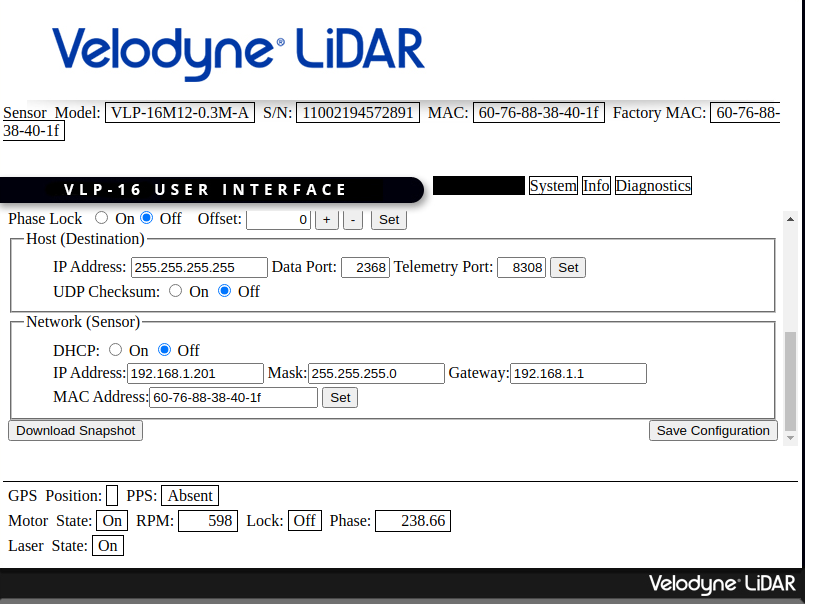
无需麻烦的ip设置等等,直接将 VLP16 通过网线连接到路由器上,尝试访问 192.168.1.201网页,成功访问则说明检测到雷达(注意路由器不要有其他的设备设置为相同地址)
ROS环境配置
安装ROS依赖
sudo apt-get install ros-noetic-velodyne
创建ROS工程
mkdir -p catkin_velodyne/src
cd catkin_velodyne/src
git clone https://github.com/ros-drivers/velodyne.git
cd ..
rosdep install --from-paths src --ignore-src --rosdistro noetic -y
catkin_make
启动 VLP16 节点
开启节点
roslaunch velodyne_pointcloud VLP16_points.launch
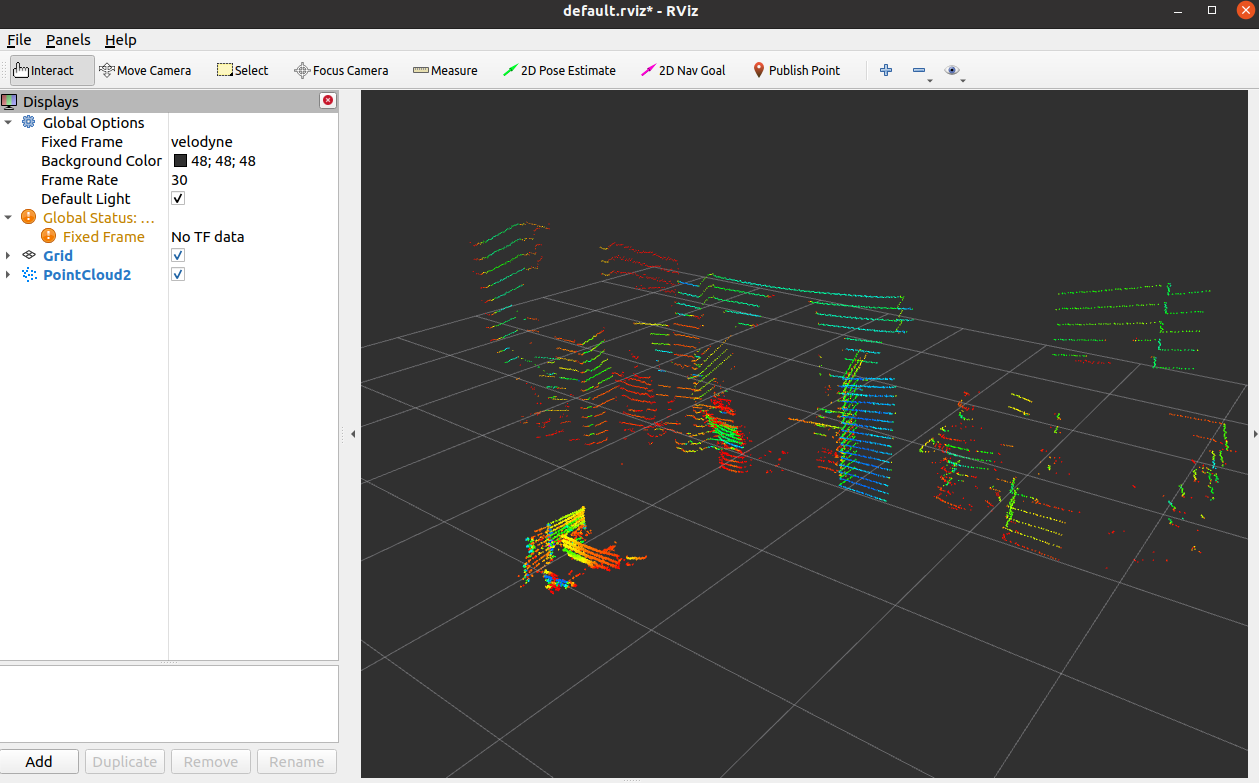
rviz查看点云
rosrun rviz rviz -f velodyne
设置死区
在192.168.1.201网页端,可以设置去掉因为固定遮挡而形成的死区,设置 FOV 的开始角度和结束角度。
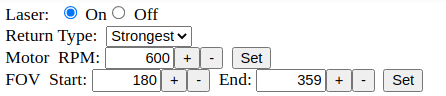
在完成设置后点击最后的保存设置!
评论区