



GPS 基本概念
GPS的工作原理是通过接收设备(如智能手机或专用GPS接收器)从多颗GPS卫星接收信号。这些信号包含卫星的位置和发射时间。接收设备使用这些信号来计算其到每颗卫星的距离,并使用这些距离来确定其自身的精确位置。这通常涉及至少从四颗卫星接收信号,以提供三维位置(纬度、经度和高度)和时间信息。
GPS的精度受多种因素影响,包括大气条件、电子干扰和接收器的质量。尽管如此,对于大多数消费者应用,其定位精度通常在几米之内。对于特定的应用和增强技术,如差分GPS(DGPS),精度可以提高到厘米级。
GPS系统在许多领域都有广泛应用,包括汽车导航、手机定位服务、海上和航空导航、地质勘探和灾害管理。
RTK GPS
RTK GPS(Real-Time Kinematic GPS)是一种高精度的定位技术,它利用GPS卫星信号进行实时的位置校正,以提供厘米级的定位精度。这种技术是通过在基站(已知位置)和移动接收器之间比较GPS信号来实现的。
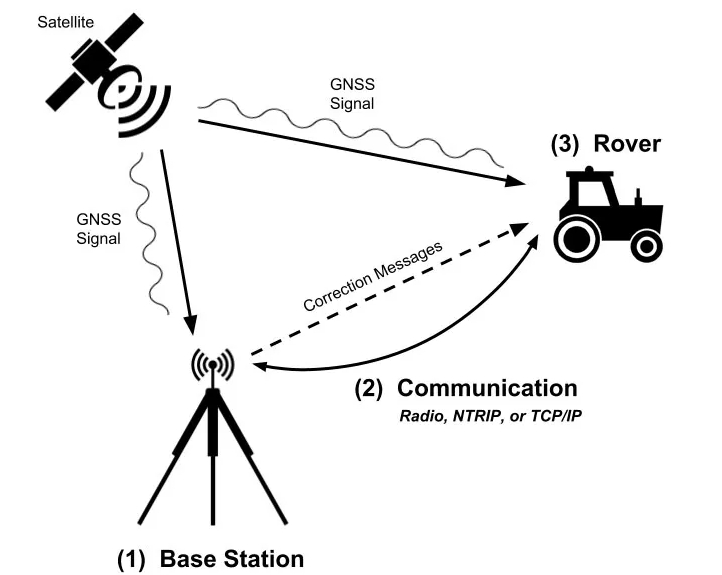
RTK的工作原理:
- 差分GPS:RTK是一种差分GPS技术。它通过比较来自GPS卫星的信号在两个不同位置(基站和移动接收器)的微小差异来工作。
- 基站:基站位于一个已知精确坐标的固定位置。它接收GPS卫星的信号,并计算出误差。
- 移动接收器:移动接收器同样接收来自相同GPS卫星的信号,并利用从基站接收到的误差信息进行实时校正。
- 信号校正:基站将其计算出的误差信息通过无线电、蜂窝网络或其他通信方式实时发送给移动接收器,后者使用这些数据来校正自己的GPS信号,从而极大地提高其定位精度。
算法过程:
- 载波相位观测:RTK GPS主要利用载波相位观测进行定位。这种方法比使用卫星信号的编码信息更精确,因为载波的波长较短,从而提供了更高的测量精度。
- 双差分技术:RTK算法通常使用双差分技术来减少误差。这涉及到对来自两个接收器(基站和移动接收器)和至少两颗卫星的信号进行差分计算。
- 固定解和浮点解:在处理差分信号时,RTK算法会尝试确定每个GPS卫星信号的整数模糊度。成功解决整数模糊度问题可以获得固定解(更高的精度),否则只能获得浮点解(精度较低)。
RTK GPS的状态:
- 单点定位(SPP):没有使用差分校正数据时的普通GPS定位模式。
- 浮点解(Float RTK):当RTK系统无法完全解决整数模糊度时,将提供浮点解。这比单点定位精确,但不如固定解精确。
- 固定解(Fixed RTK):当整数模糊度完全解决时,RTK系统将提供固定解,这是最高精度的状态。
RTK系统提供了迄今为止GPS技术中的最高精度,因此它在各种精密应用中变得越来越重要。
数据分析
RTK(实时动态运动定位)设备,作为一种高精度的GPS定位系统,会输出多种数据类型,旨在提供详尽的位置和时间信息。这些数据通常包括但不限于以下几种:
-
位置数据:
- 经度、纬度和高度坐标。
- 以某种坐标系统(如WGS 84)表示的位置信息。
-
速度数据:
- 移动接收器的速度,通常包括水平和垂直方向的速度。
-
时间数据:
- 精确的时间戳,与卫星的时间同步。
-
定位精度估计:
- 定位精度的估计值,例如水平和垂直定位误差界限。
-
差分校正数据:
- 如实时差分(RTD)信息,用于提高定位精度。
-
载波相位和信号强度信息:
- 载波相位测量值,对于解算整数模糊度至关重要。
- 各个卫星信号的信噪比(SNR)和信号强度。
-
卫星信息:
- 可见卫星的编号和状态。
- 卫星几何分布的质量指标,如GDOP(几何精度衰减因子)。
-
固定/浮动解状态:
- 当前解算状态,指示是固定解(Fixed Solution)还是浮动解(Float Solution)。
-
健康状态和诊断信息:
- 设备自身的健康和状态信息,可能包括温度、电源状态等。
-
日志和事件记录:
- 定位事件和系统日志,用于问题诊断和分析。
这些数据通常以NMEA(国家海洋电子协会)格式或其他专业格式(如RTCM)输出,并可以通过串行端口、蓝牙或Wi-Fi等通信接口传输。RTK设备输出的确切数据类型和格式可能因制造商和模型而异,因此用户在使用时应参考具体设备的技术文档。
具体分析
例如,以下是从某个设备中接收的GPS数据:
$GNRMC,120924.00,A,3510.5689031,N,12654.0297672,E,0.850,,151123,,,D,V*19 12:09:24
$GNGGA,120924.00,3510.5689031,N,12654.0297672,E,2,11,1.67,71.462,M,19.729,M,2.0,0000*5F 12:09:24
以上是 NMEA(National Marine Electronics Association)格式的,这是一种常用于GPS设备的数据标准。
这些数据包含两种主要类型的NMEA语句:$GNRMC 和 $GNGGA。
-
$GNRMC(Recommended Minimum Specific GNSS Data):
- 时间:例如,在第一行中,“120924.00”表示时间是12:09:24(UTC时间)。
- 状态:“A”表示数据有效,“V”表示导航接收器警告。
- 纬度:“3510.5689031,N”表示纬度是35度10.5689031分北纬。
- 经度:“12654.0297672,E”表示经度是126度54.0297672分东经。
- 速度:例如,“0.850”表示速度是0.850节。
- 日期:“151123”表示日期是2023年11月15日。
- 定位模式:“D”表示差分GPS模式。
-
$GNGGA(Global Navigation Satellite System Fix Data):
- 时间:“120924.00”表示时间是12:09:24(UTC时间)。
- 纬度 和 经度:同上。
- 定位质量:“2”表示差分GPS定位(DGPS)。
- 卫星数量:“11”表示正在使用11颗卫星进行定位。
- HDOP(水平精度衰减因子):“1.67”表示定位的水平精度。
- 海拔高度:“71.462,M”表示海拔高度是71.462米。
- 大地水准面高度:“19.729,M”表示大地水准面高度是19.729米。
- 差分数据年龄:如“2.0”表示差分数据的年龄是2.0秒(差分GPS校正信号的时延)。
- 差分基站ID:“0000”表示差分GPS基站的标识。
在 $GNGGA(Global Navigation Satellite System Fix Data)NMEA(National Marine Electronics Association)语句中,定位质量值提供了关于当前定位的状态和精度的关键信息。这个字段的具体值及其含义如下:
- 0:无效定位 GPS尚未获得或失去定位。
- 1:标准GPS定位 GPS定位有效,通常指没有使用差分修正的标准GPS定位。
- 2:差分GPS定位(DGPS) 使用了差分GPS修正,通常通过地面参考站提供额外的校正信息,提高定位精度。
- 3:PPS模式 PPS(精密定位服务)模式,通常用于军事或其他政府授权使用的高精度定位。
- 4:固定RTK 实时动态运动定位的固定解。这是RTK GPS系统中最高精度的定位模式,提供厘米级精度。
- 5:浮动RTK 实时动态运动定位的浮动解。这是RTK GPS系统中的一种较高精度模式,但精度低于固定RTK。
- 6:估算(死算) 使用先前的定位数据或其他方法进行估算的定位,精度较低。
- 7:手动输入模式 定位数据是手动输入的。
- 8:模拟模式 定位是通过模拟方式获得的。
一般如果是 RTK 设备,主要看到定位质量值为2(差分GPS定位),4(固定RTK),和5(浮动RTK)这三种状态。
这些数据提供了关于设备当前位置、时间、定位状态、使用的卫星数量、精度因子等的详细信息。通过这些数据,您可以了解设备的确切位置、定位精度、以及是否正在使用差分GPS来提高定位精度。每个数据点都提供了一个特定时刻的定位信息,这对于需要高精度定位的应用非常重要,如航海导航、地理测绘等。
坐标系
GPS系统主要使用WGS 84(World Geodetic System 1984)坐标系,但GPS接收设备通常能够将这些坐标转换为多种其他坐标系。下面是一些常见的坐标系:
-
WGS 84:
- 全球定位系统(GPS)的标准坐标系。
- 提供全球范围内的位置信息。
- 用于定义地球上任意点的经度、纬度和高度。
-
GCS(地理坐标系统):
- 基于WGS 84或其他地球参考椭球体。
- 用经度和纬度表示位置。
-
UTM(通用横轴墨卡托):
- 将世界划分为多个纵向区域,每个区域使用不同的投影。
- 提供在局部范围内更准确的平面坐标。
-
国家/地区特定的坐标系:
- 许多国家或地区有自己的坐标系,如北美的NAD83(北美大地基准1983),欧洲的ETRS89(欧洲陆地参考系统1989)等。
- 这些系统可能基于特定区域的地理特性进行优化。
-
Web Mercator:
- 常用于网络地图服务,如Google Maps和Bing Maps。
- 适合于电子地图浏览,但不适于精确测量。
大多数现代GPS接收设备和软件支持在这些不同的坐标系之间进行转换,使用户能够根据需要选择最合适的系统。例如,测量师可能倾向于使用UTM坐标系进行精确的地面测量,而在全球范围内航行的人可能会使用WGS 84坐标系。
UTM(通用横轴墨卡托)
UTM(通用横轴墨卡托)坐标系是一种广泛使用的地理坐标系统,特别适用于精确的地图制作和空间数据管理。以下是关于UTM坐标系的详细介绍:
基本原理:
- 投影方法:UTM是一种基于墨卡托投影的地图投影系统,它使用一个圆柱投影面,这个面沿地球的一个纬度线(通常是赤道)接触地球。
- 区域划分:UTM系统将地球表面分割成60个垂直的6度经度区域,从180度经线西侧的第1区开始,向东至180度经线的第60区。
区域和带号:
- 区域编号:每个6度经度范围的区域被赋予一个从1到60的编号。
- 纬带指示:除了区域编号外,UTM还使用纬带字母从南到北(从C到X,不包括I和O)表示不同的纬度范围,每个纬带约8度纬度高。
坐标表示:
- 东坐标(Easting):表示从中央经线(每个区域的中心线)向东的距离,单位为米。中央经线的东坐标被赋值为500,000米,以避免出现负数坐标。
- 北坐标(Northing):表示从赤道向北或向南的距离,单位也是米。在北半球,赤道的北坐标是0米;在南半球,赤道的北坐标设置为10,000,000米。
UTM坐标系因其相对简单和高精度的特性,在专业和学术领域得到了广泛的使用。对于处理局部地区的空间数据,UTM提供了一个有效和精确的方法。
导航系统中的频率信号
L1, L2, 和 L5 是指卫星导航系统中的不同频率信号。它们是全球定位系统(GPS)和其他全球卫星导航系统(GNSS)如GLONASS、Galileo、和北斗卫星导航系统使用的关键信号频率。这些信号对于定位、导航和时间同步至关重要。下面是对这三个频率的简要说明:
-
L1频率:这是最早被GPS系统使用的频率,大多数消费级GPS接收器都使用L1信号。L1频率携带了C/A(粗/获取)码,用于标准定位服务,以及更复杂的P(Y)码,用于军事和政府使用。
- L1 C/A:这是最初的GPS信号,用于民用。它使用1.57542 GHz的频率。
- L1C:这是一个新的信号组件,设计用于民用GPS,并被引入到了GPS III卫星中。它提供了改进的信号结构,用于增强性能和兼容性。
-
L2频率:L2频率主要被用于专业级GPS接收器,用于提供更精确的测量。这是因为L2携带的P(Y)码可以用来减少大气造成的延迟效应,这种效应在L1信号上更为显著。通过同时使用L1和L2信号,可以显著提高定位的准确性。
- L2C:这是针对民用的第一个L2 GPS信号,使用1.2276 GHz频率。L2C提供了比L1 C/A更好的性能,包括更强的信号和更快的定位。
- L2 P(Y):这是一个加密的信号,主要用于军事和政府应用。
-
L5频率:L5是相对较新的信号频率,它提供更高的传输功率和更先进的调制技术,从而提高了信号的稳定性和抗干扰能力。L5频率也被设计用于民航安全关键应用,如飞机的精确导航。
结合使用这些不同的频率可以提供更准确和可靠的定位结果,特别是在多径效应和大气延迟等因素影响较大的情况下。多频接收器(同时接收L1, L2和L5信号的设备)特别适用于需要高精度定位的应用,例如测绘、农业、建筑和军事用途。
评论区