



摘要 Link
- 在大范围环境下实现自主导航定位的能力要求越来越高,其中 Lidar-SLAM 是研究的主流。
- 但是 Lidar-SLAM 在高动态或稀疏特征的极端环境中会退化并影响定位和建图效果。
- 目前大量工作基于激光雷达的多传感器融合 SLAM 正在推进,以获得更稳定和鲁棒的表现。
简介
- 精确定位是移动机器人自主完成任务的关键技术之一。随着机器人技术的飞速发展,单一的传感器已经不能满足机器人日益丰富的功能需求。因此,多源感知信息融合技术逐渐受到关注。
- 在室内环境中,二维激光雷达以高精度,低数据量成为首选。而在室外环境中,随着应用场景的复杂化,3D多线程的激光雷达逐渐广泛的被使用。其提供高密度点云,匹配方式更丰富,帧间匹配的鲁棒性更好。但代价是价格昂贵、数据量大、处理难度大。
- SLAM 系统包括基于视觉、基于激光雷达和基于视觉-激光融合的方案,以实现实时高精度六自由度状态估计。
- 单传感器在复杂环境中往往存在局限性。视觉对初始化的依赖和对光照敏感导致系统不稳定。在非结构化场景的定位中Lidar 提供的稀疏点云信息则会迅速退化。此外,快速运动和长期误差积累进一步使里程计失效。
该论文贡献是:
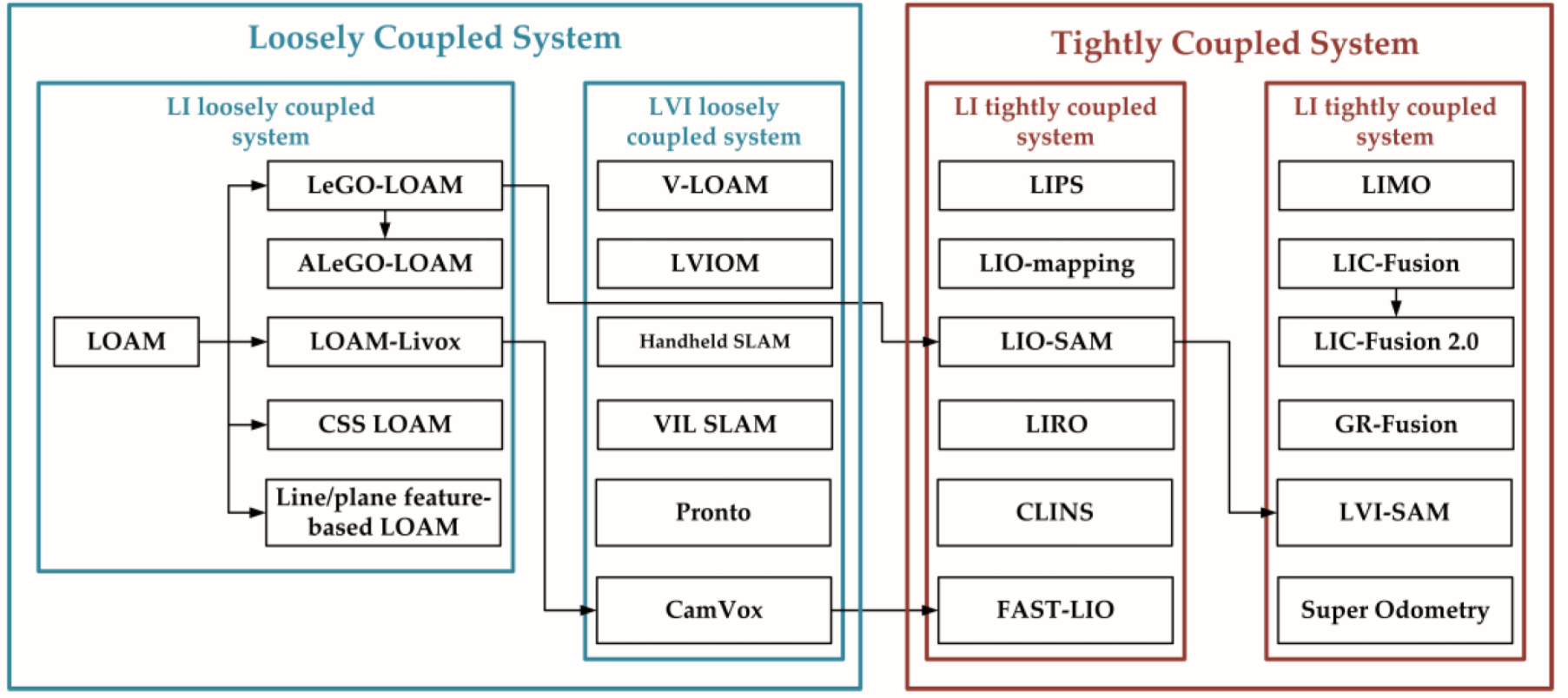
- 根据融合传感器的类型和数据耦合方式对近年来的多传感器融合SLAM系统进行分类和总结。
- 展示了多传感器融合的发展历程,回顾了松耦合和紧耦合系统的工作。
- 回顾了一些 SLAM 数据集,并使用 UrbanNav 数据集比较了五种开源算法的性能。
同步定位与建图系统(SLAM)
- 在过去的几十年的发展中,SLAM 技术逐渐体系化,开发出基于各种传感器的SLAM系统,如激光雷达、摄像头、毫米波雷达、超声波传感器等。
- 算法层面则是基于特征的融合 SLAM 框架,其中可以分为定位和建图。由传感器组成的里程计,提供实时位姿估计,为3D场景的重建和拼接提供依据。高精度 3D 重建为基于特征的里程计的姿态估计提供了重要数据。
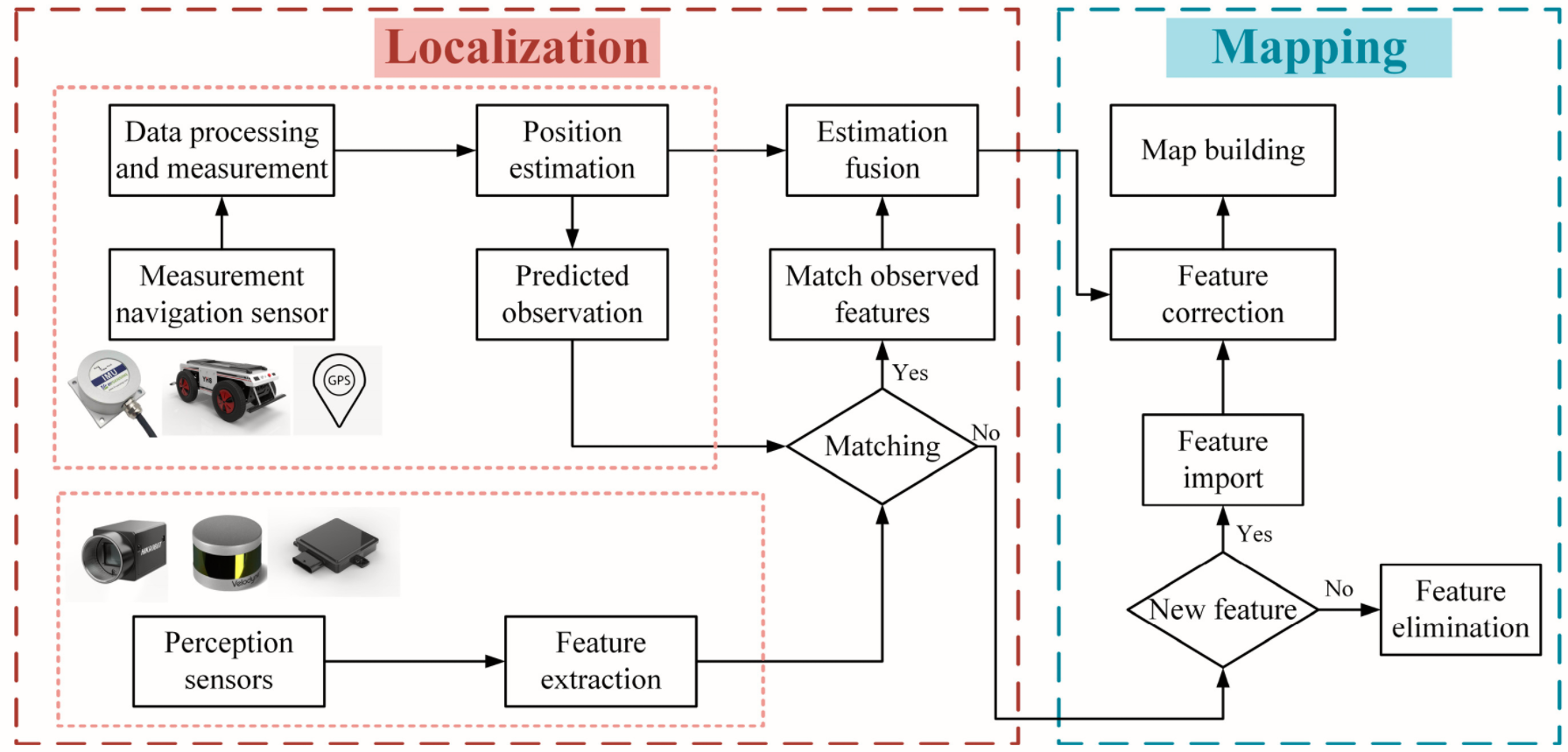
- 在近几年的发展中,将 SLAM 系统分为前端(Front-end)和后端(Bck-end)。
– 前端负责实时估计当前帧位姿,并存储相应的地图信息。
– 后端负责大规模的姿势和场景优化。其中主要是闭环检测(Closed-loop detection)和全局优化(Glbal optimization)。
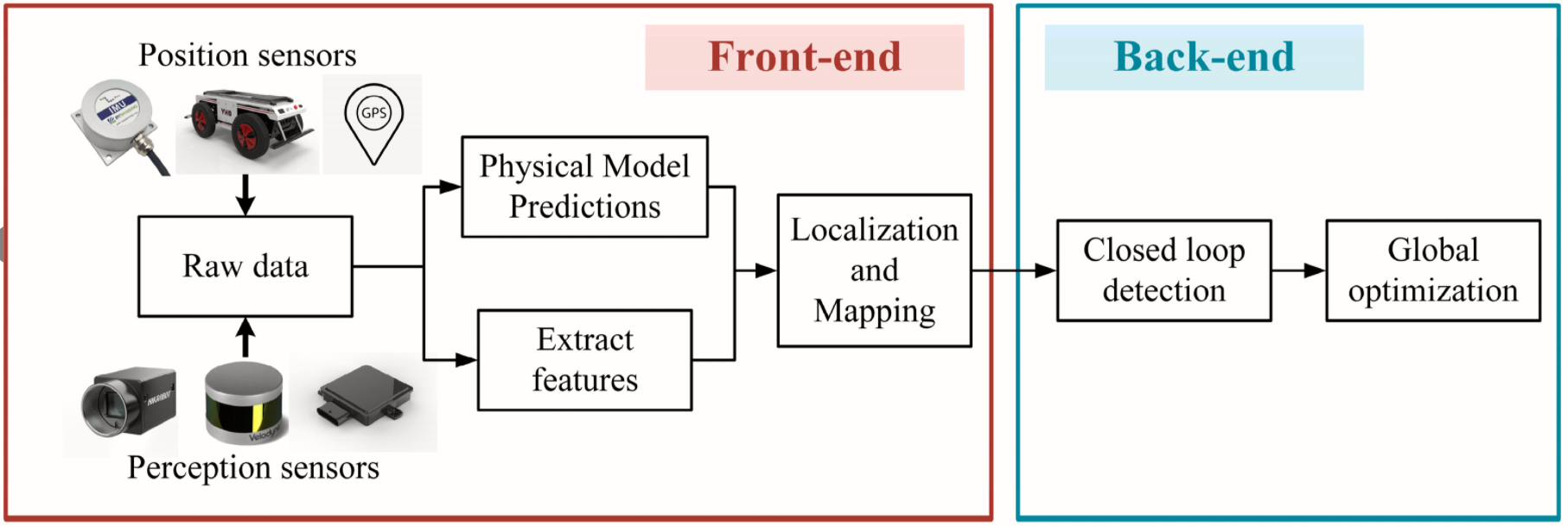
- 回环检测是目前 SLAM 的关键问题之一,它使得系统能够识别访问过的场景并触发全局范围的漂移校正。
- 全局优化是为了减缓误差的累计,通过联合所有的帧进行约束优化。
-
激光雷达、RGB相机、IMU是 SLAM 系统中最常见的传感器。
– 激光雷达可以为系统提供大场景的丰富环境结构信息。然而,其输出的数据是离散的和大量的。
– RGB相机可以捕捉环境中的颜色和纹理,但无法直接感知深度,容易受到光线的扰动。
– IMU可以在很短的时间内灵敏地感知系统的微弱变化,但长期漂移是不可避免的。 -
大多数的多模态传感器 SLAM 系统使用了 LIDAR、相机和 IMU 的不同组合,算法上分为松耦合 loosely-coupled或紧耦合 tightly-coupled模式。
– 松耦合算法分别处理每个传感器的测量数据,后将它们融合在一个滤波器中,以获得最新的状态估计结果。具有计算量小、系统结构简单、易于实现的优点
– 紧耦合系统联合优化所有传感器的测量数据,并结合每个传感器的观测特性和物理模型,以获得更鲁棒的位姿估计。具有计算量大,实现难度大,但可以获得更准确的状态估计。 -
根据系统的耦合方式和需要融合的传感器类型,将这些工作分为LIDAR-IMU松耦合系统、Visual-LIDAR-IMU松耦合系统、LIDAR-IMU紧耦合系统,以及Visual-LIDAR-IMU 紧耦合系统。
基于激光雷达的多传感器松耦合系统
松耦合主要应用于三个方面:基于多传感器的实时姿态估计、基于原始数据的信息互补和传感器辅助姿态约束。
LIDAR-IMU 松耦合系统
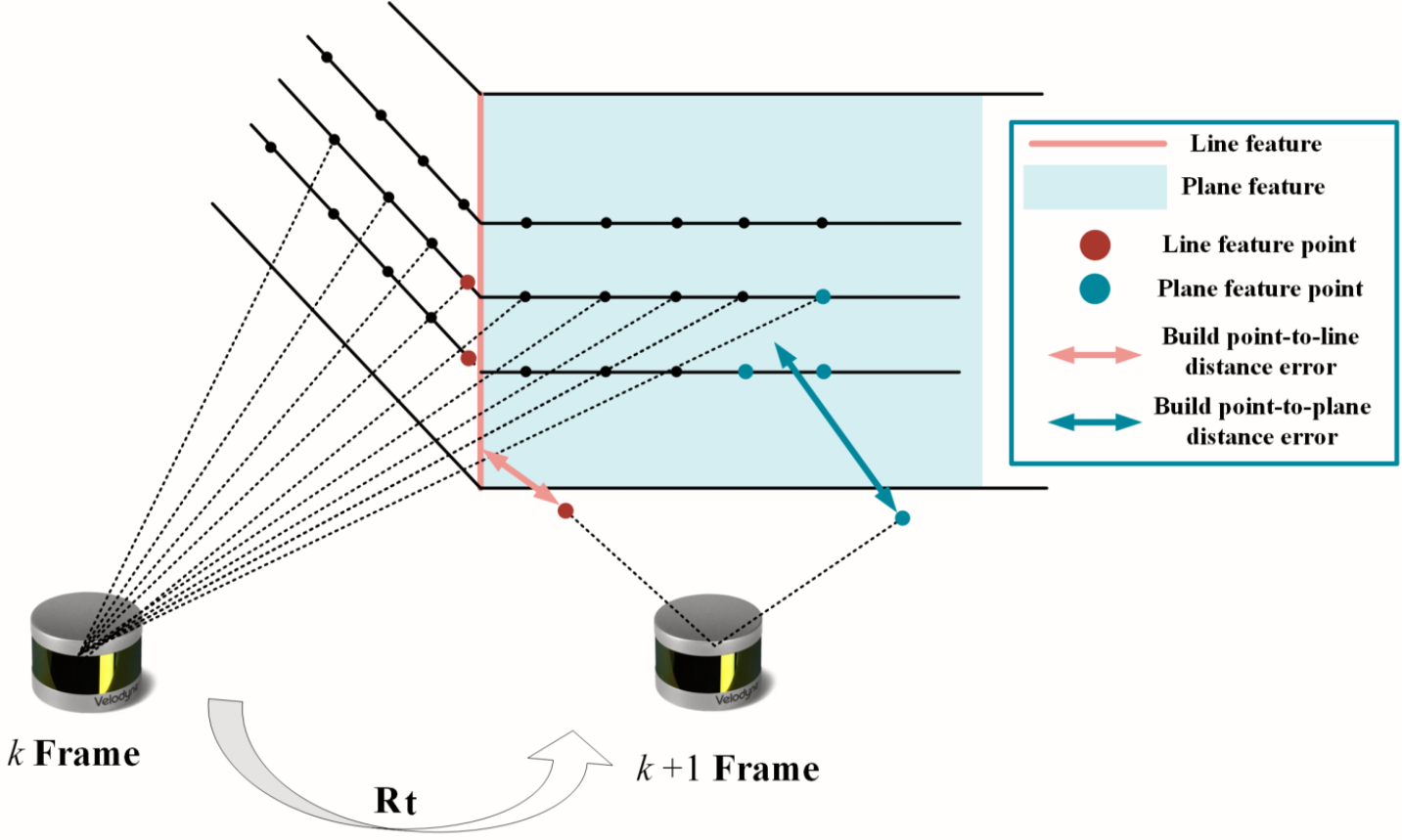
- 在开创性的 LOAM 算法中,实现了从复杂点云中提取有效边缘和平面特征点的信息。进而,利用点到线和面的距离构造误差函数,求解位姿的非线性优化问题。
– 并且利用六轴 IMU 的陀螺仪和加速度计的积分运算得到先验位姿,进一步提高了激光雷达里程计的精度。
– 但 LOAM 在后端没有闭环检测和全局优化。
-
在 LOAM 的基础上 LeGO-LOAM 算法,在数据预处理中引入点云聚类和地面分割,以加速点云配准。
– 同时利用简单的加速度公式处理 IMU 数据进行点云畸变校正以及提供先验位姿。 -
CSS-based LOAM 和 ALeGO-LOAM 则是提出了曲率尺度空间法和自适应云采样方法,提取了更精确的边点和平面点,增强了LOAM的特征质量。
-
LiTAMIN 优化改进了前端 ICP 算法中引入对称 KL 发散。它的优化对象不仅包括点之间的距离,还包括分布形状的差异。为了保证前端的实时性和计算精度。
-
SuMa、Elastic-LiDAR Fusion、Droeschel 则是将距离数据的形状近似为一组称为 面元Surfel,这便于在 GPU 中进行 ICP 处理。
-
MULLS 使用基于分类特征点的多度量线性最小二乘迭代最近点(MULLS ICP)算法来有效地估计自运动,并构建基于子地图的PGO(姿势图优化)后端优化。
-
通过对点云的几何和强度信息进行编码,并设置全局点云描述符实现旋转不变闭环匹配算法。也可以将点云的所有关键帧转换的二维直方图,通过计算当前帧和历史关键帧之间的相似性来确定闭环发生的位置。
-
然而,这种松散的积分方法并不能有效地排除 IMU 本身测量偏差的影响。
| Year | Method | Strength | Problem |
|---|---|---|---|
| 2014 | LOAM | Low-drift.Low-computational complexity. | Lack of closed loop and backend optimization. |
| 2018 | LeGO-LOAM | Ground segmentation.Two-stage optimization. | Closed loop detection accuracy is low. |
| 2018 | SuMa | A surfel-based map can be used for pose estimation and loop closure detection. | High complexity.High computational cost. |
| 2019 | Line/plane feature-based LOAM | Explicit line/plane features. | Limited to an unstructured environment. |
| 2019 | ALeGO-LOAM | Adaptive cloud sampling method. | Limited to an unstructured environment. |
| 2019 | CSS-based LOAM | Curvature scale space method. | High complexity. |
| 2019 | A loop closure for LOAM | 2D histogram-based closed loop. | Ineffective in open large scenes. |
| 2020 | Two-stage feature-based LOAM | Two-stage features.Surface normal vector estimation. | High complexity. |
| 2020 | Loam-livox | Solid State LIDAR.Intensity values assist in feature extraction.Interpolation to resolve motion distortion. | No backend. No inertial system |
| 2021 | MULLS | Optimized point cloud features.Strong real-time. | Limited to an unstructured environment. |
| 2021 | LiTAMIN | More accurate front-end registration.Faster point cloud registration.Faster point cloud registration. | Lack of backend optimization. |
激光雷达-视觉-IMU松耦合系统
-
激光雷里程计退化发生在非结构化和重复的环境中。即使在 IMU 的协助下进行定位,它仍然无法长时间正常工作。
– 视觉里程计不需要特定的结构特征,如边缘和平面,它们依赖于足够的纹理和颜色信息来完成定位。然而,视觉传感器无法直观地获得深度信息。
– LIDAR-Visual-IMU 松散耦合系统的 LO 和 VO 大多独立运行,但它们相互共享定位信息,以实现姿态校正和更平滑的姿态估计。 -
LOAM 通过将单目相机的特征跟踪以及 IMU 相结合来扩展为 V-LOAM 算法。
– 将特征点深度与点云相关联,用于激光雷达扫描匹配里程计 LO的视觉惯性里程计 VO。
– 然而,这项工作中的 VO 只提供 LO 前的姿态,最终的误差解与 LOAM 完全相同,没有视觉耦合。 -
LVIOM 基于 V-LOAM 算法采用顺序并行处理流程求解从粗到细的运动估计。
– 使用视觉惯性VIO耦合方法来运动估计并执行 LO 扫描匹配,以进一步完善运动估计和映射。
– 由此可实现高频、低延迟的运动估计,以及密集、准确的 3D 地图配准。 -
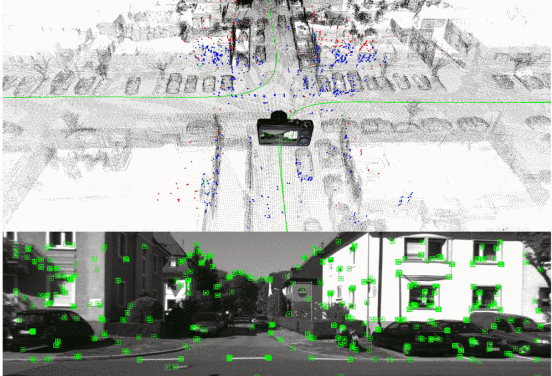
Monocular Camera Localization 选择在已知的点云图中执行视觉定位。
– 基于本地 BA 的视觉里程计系统从图像特征中重建稀疏的3D点,并不断将其与地图匹配,以在线方式跟踪相机的姿势。
–由于它仅依赖于匹配的几何形状,因此对环境光度外观的变化具有鲁棒性。但是,此方法要求事先获取地图。
-
VIL SLAM是基于 V-LOAM 和 VINS-MONO 的激光雷达-视觉-惯性SLAM系统。从视觉惯性紧密耦合VIO开始,用于运动估计,然后进行 LO 扫描匹配,以进一步优化估计并在地图上注册点云。
-
Stereo VIL SLAM使用双目相机形成激光雷达-视觉-惯性系统。
– 双目VIO系统采用立体匹配和IMU测量来执行 IMU 预积分和姿势图的紧密耦合,为 LO 提供准确可靠的初始姿势。
– LO 基于 LOAM,增加了基于视觉的闭环检测和基于姿态图的后端优化,并使用iSAM2,逐步优化激光雷达测程因子和闭环因子。 -
Pronto 将 VO 和 LO 系统与腿部里程计相结合。
– 扩展卡尔曼滤波器 (EKF) 融合 IMU 和腿式测程测量,用于姿态和速度估计。
– 集成了来自VO和LO的姿态校正,并以松散耦合的方式校正姿态漂移。 -
DSO!认为相对稀疏的点云对于与视觉特征相关的深度没有意义。
– 应用了直接法将激光雷达和摄像头相结合,实现松耦合的SLAM系统,解决了数据关联中的稀疏性问题。 -
Redundant Odometry 提出了一个由多种测程法组成的系统。
– 姿态估计算法包括 GICP(广义迭代最近点), P2P-ICP (点到平面迭代最近点), NDT(正态分布变换), ColorICP (颜色迭代最近点)。利用多个里程计来提高完整性和鲁棒性。
– 定义基于点云的定位评估方法和评分标准,以生成最佳姿势结果。 -
LiDAR-Visual-Inertial Estimator! 提出了一种激光雷达辅助VIO系统,该系统依靠体素地图结构,将激光雷达的深度信息高效分配给视觉特征。
| Year | Method | Strength | Problem |
|---|---|---|---|
| 2015 | V-LOAM | Visual feature fusion point cloud depth. | Weak correlation between vision and LIDAR. |
| 2016 | Monocular Camera Localization | Rely on a priori maps.Local BA. | Unknown environment failure. |
| 2018 | LVIOM | VIO preprocessing.Addresses sensor degradation issues.Staged pose estimation. | Inertial system state stops updating when vision fails. |
| 2018 | Handheld SLAM | The incorporation of depth uncertainty.Unified parameterization of different features. | System failure when vision is unavailable. |
| 2018 | Direct Visual SLAM for Camera-LiDAR System | Direct method.Sliding window-based pose graph optimization. | Not available in open areas. |
| 2019 | VIL SLAM | VIO and LO assist each other.Addresses sensor degradation issues. | Closed loop unavailable when vision fails. |
| 2019 | Stereo Visual Inertial LiDAR SLAM | Stereo VIO provides initial pose.Factor graph optimization. | No raw data association between VIO and LO. |
| 2020 | Pronto | EKF Fusion Leg Odometer and IMU. LO and VO corrected pose estimation. | Drifts seriously. |
| 2020 | CamVox | Livox LIDAR aids depth estimation. An automatic calibration method. | No inertial system… |
| 2021 | Redundant Odometry | Multiple algorithms in parallel.Filter the best results. | High computational cost. No data association. |
| 2021 | LiDAR-Visual-Inertial Estimator | LIDAR assists the VIO system.Voxel map structures share depth.Vanishing Point optimizes rotation estimation. | System failure when vision is unavailable. |
基于激光雷达的多传感器紧耦合系统
凭借其高频运动响应特性,IMU一直是移动机器人不可或缺的传感器。对于紧耦合的系统,将 IMU 与其他里程计有效融合是一个关键问题。
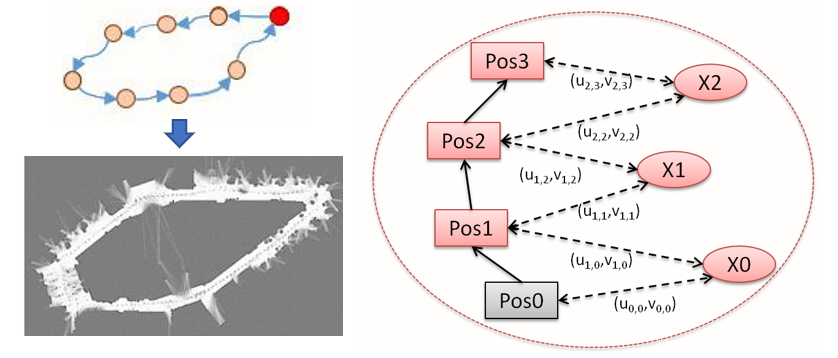
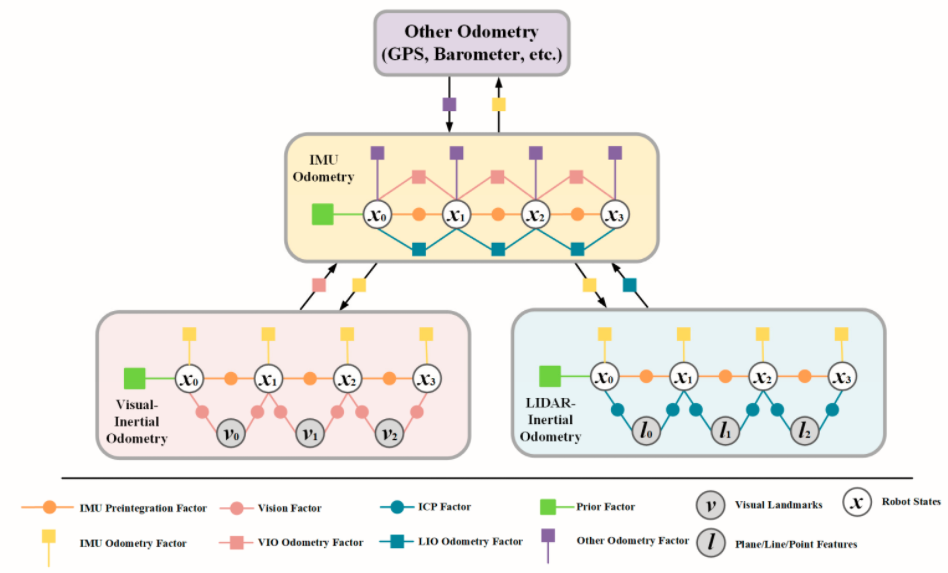
IMU 预积分公式、误差传递模型和残差定义,对 LIO 和 VIO 的后续发展产生了深远影响。这些方程和模型成为紧耦合系统联合优化的理论基础。
定义世界坐标系为 ,机器人与 IMU 统一定义为 ,机器人的状态向量为 :
其中, 是旋转量, 和 是机器人的位置与速度矢量, 是 IMU 的偏置量。而 IMU 的测量值可以表示为:
其中, 和 是 IMU 的角速度与角速度测量值。 和 为真值。 是陀螺仪偏置, 是加速度计噪声,是局部引力加速度, 是世界坐标系到 IMU 坐标系的旋转矩阵, 代表时间。相对运动公式可以表示为:
残差方程表示:
通过预积分公式和误差项的定义,可以在联合优化过程中解耦 IMU 与世界坐标系的耦合关系。系统可以更新 IMU 的偏差,以确保添加和优化IMU数据。
因此,可以获得更接近真实值的测量值。残差的定义使 IMU 更容易组合其他传感器里程计的残差项,以创建更完整的误差函数。这也是紧耦合优化的基本原理。紧耦合系统的因子图如下:
激光雷达-IMU LIO 紧耦合系统
-
LIPS 采用基于图的优化框架,提出了最近点的平面表示。
– 将一组点云参数化为平面特征,然后将残差函数转换为两帧平面参数之差,与 IMU 预积分的残差项一起构成最终的优化函数。 -
IN2LAMA 提出了 IMU 的预集成用于消除原始点云的运动失真。
– 将 IMU 和 LIDAR 数据紧密集成到优化公式中,该公式基于IMU的外参描述了 LIDAR 扫描中的运动失真。
– 还将预积分误差的一阶形式考虑为时差,解决了硬件时间异步问题。 -
LIO-mapping 共同优化了激光雷达和 IMU 的测量。
– 进一步使用滑动窗口模型来保持一定规模的优化数据。LIOM的精度优于LOAM。
– 然而,由于 LIOM 旨在处理所有传感器的测量结果,因此无法实现实时性。 -
LiDAR Inertial Odometry 二维SLAM的子图表示引入三维激光雷达测程法,并添加惯性数据以建立帧之间的运动预测和约束。
– 采用三维占用网格法代替二维占用网格,实现6个自由度全部的位姿测量。
– 创新性地加入了环境变化检测(ECD)模块,可以检测已知的周围环境是否发生了变化。 -
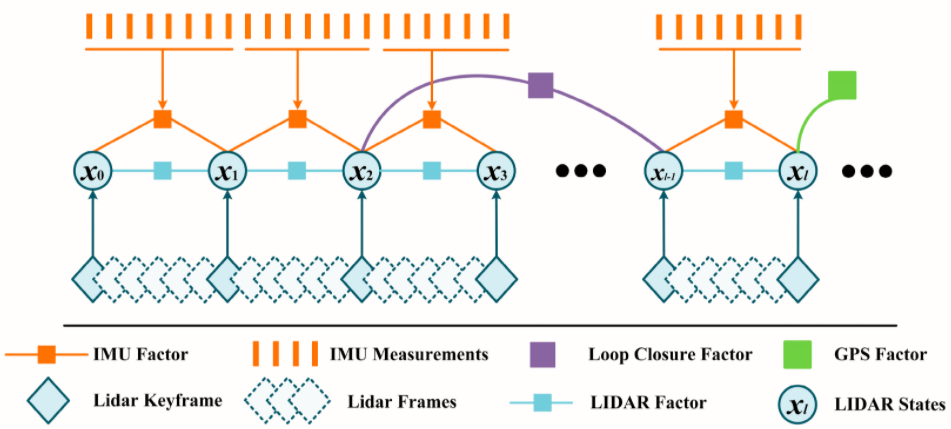
LIO-SAM 基于 LeGO-LOAM 结合IMU相关理论进行的改进。
– 在因子图上构建激光雷达惯性里程计,并将多个相对和绝对测量(包括闭环)作为因子纳入系统
– 边缘化旧的姿态和点云数据,以取代与全球地图的匹配扫描
– 该系统使用本地地图匹配而不是全局匹配,以显着提高实时性能
– 系统还增加了 GPS 绝对定位系数,用于校正系统的长期漂移
– 但是,由于特征提取依赖于几何环境,因此该方法在开放场景中仍然无法长时间工作
-
LIRO 提出了 LIO 与 UWB 地标测距相结合的传感器融合方案。
– 通过超宽带(UWB)范围测量到这些地标,这些地标可以很容易地以最小的成本和时间部署在环境中。
– 在滑动窗口中将 IMU、LIDAR 和 UWB 数据与基于时间戳的机器人状态紧密耦合,以构建由 UWB、LO 和 IMU 预集成组成的成本函数。
– 但是,UWB的使用场景有很大的局限性。该系统在各种遮挡场景中将不再具有优势。 -
Inertial Aided 3D LiDAR SLAM 提出一种大规模环境下混合几何基元的惯性辅助三维激光雷达SLAM系统。
– 提取原始点云的显式混合特征,包括地面特征、边缘特征和平面特征。引入了基于深度学习的LPD-Net,以生成点云的全局描述符。
– 循环闭包检测可以在关键帧数据库中完成。该方法大大提高了闭环检测的准确性。 -
RF-LIO 是在LIO-SAM的基础上提出的动态SLAM框架。
– 该系统自适应地添加由点云组成的多分辨率范围图像,并使用紧密耦合的激光雷达惯性里程计去除移动物体。然后将激光雷达扫描与子图匹配。
– 因此,即使在高度动态的环境中,它也可以获得准确的姿态估计结果。但是,长时间在开放场景中移动时,仍然会发生 LIO 退化。 -
惯性系统的紧密耦合无疑会增加系统的计算负担,同时提高精度。
-
大多数现有算法通过边缘化历史数据或限制本地地图容量来提高计算速度。后端优化通常只构建激光雷达的姿态图,而不添加IMU测量的偏差和速度。
-
然而,由于对几何特征的依赖,一旦惯性系统在开放的非结构化场景中失去LO约束,SLAM将遭受严重的漂移和退化。
-
在速度和精度之间找到平衡是这一阶段工作的难点。
| Year | Method | Strength | Problem |
|---|---|---|---|
| 2018 | LIPS | The singularity free plane factor.Preintegration factor.Graph optimization. | High computational cost. No backend or local optimization. |
| 2019 | IN2LAMA | Pre-integration to remove distortion.Unified representation of inertial data and point cloud. | The open outdoor scene fails. |
| 2019 | LIO-mapping | Sliding window.Local optimization. | High computational cost.Not real time. |
| 2020 | LiDAR Inertial Odometry | The occupancy grid based LO.Map updates in dynamic environments. | Degradation in unstructured scenes. |
| 2020 | LIO-SAM | Sliding window.Add GPS factor.Marginalize historical frames and generate local maps. | Poor closed loop detection.Degradation in open scenes. |
| 2021 | LIRO | UWB constraints.Build fusion error. | UWB usage scenarios are limited. |
| 2021 | Inertial Aided 3D LiDAR SLAM | Refine point cloud feature classification.Closed Loop Detection Based on LPD-Net. | Degradation in unstructured scenes. |
| 2021 | KFS-LIO | Point cloud feature filtering.Efficient Computing. | Poor closed loop detection. |
| 2021 | CLINS | The two-state continuous-time trajectory correction method.Optimization based on dynamic and static control points. | High computational cost.Affected by sensor degradation. |
| 2021 | RF-LIO | Remove dynamic objects.Match scan to the submap. | Low dynamic object removal rate. |
| 2021 | FAST-LIO | Iterated Kalman Filter.Fast and efficient. | Cumulative error. No global optimization. |
激光雷达-视觉-IMU LVIO 紧耦合系统
-
视觉与激光雷达能够形成了极好的互补,因为它不受场景结构的限制。因此,LVI系统因其在传感器退化情况下更强的鲁棒性而受到越来越多的关注。
-
点云和图像之间的强大数据关联使系统能够在预处理阶段紧密结合多个有效特征。它们将在匹配和优化过程中发挥重要作用。
-
LVI紧密耦合系统在优化和滤波的基础上分为两种耦合方法。
-
基于优化的方法紧密集成了单个传感器的误差模型,并通过使用本地地图或滑动窗口降低了时间同步的灵敏度。
-
LIMO 通过多种数据预处理方式对点云和图像进行强关联,实现系统稳定鲁棒。
– 系统对不同场景的点云进行前景分割、平面拟合和地面拟合,以获得视觉特征的最佳深度估计。
– 该系统结合了 3D-2D PNP(透视点问题)姿态估计方法和 2D-2D 极性约束以达到良好的本地化效果。 -
DSP-SLAM 提出了一种将目标检测与SLAM相结合的系统。
– 使用DeepSDF网络从关键帧点云和图像数据生成对象形状矢量和7D姿势
– 稀疏点云和图像分割结果用作观测值,以最小化表面损失和深度渲染损失函数。
– 对象重建和姿态更新被添加到基于 ORB-SLAM2 的 BA 因子图中,以同时优化相机姿势、地图点和物体姿势。 -
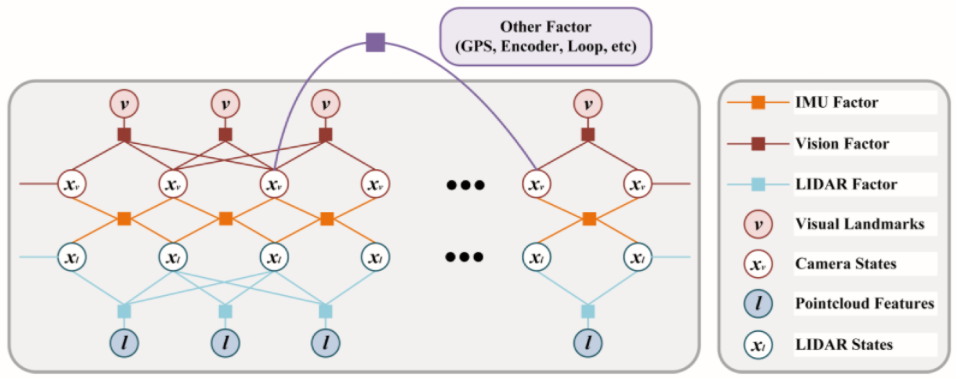
GR-Fusion 使用摄像头、IMU、激光雷达、GNSS和运动底盘编码器作为主要传感器,在滑动窗口中构建因子图模型。
– 激光雷达因子、视觉因子、IMU 因子和里程计因子作为主要约束添加到因子图中。
– 同时,局部约束与GNSS约束紧密耦合,以优化机器人的全局状态。
– 系统可实时检测传感器的劣化情况,灵活配置多工作模式,适用于多种场景。 -
Lvio-Fusion 基于图优化融合了立体摄像头,激光雷达,IMU和GPS。
– 引入了具有GPS和闭环功能的分段全局姿态图优化,可以消除累积的漂移。
– 强化学习中创造性地使用演员-评论家方法来自适应地调整传感器的权重。 -
LVI-SAM!! 由VIS(视觉惯性系统)和LIS(激光雷达惯性系统)组成。
–VIS可以为LIS提供姿态先验,LIS可以为VIS初始化提供姿态估计和准确的特征点深度。
– 闭环首先由VIS识别,并由LIS进一步完善。
– LVI-SAM 也可以在两个子系统之一发生故障时运行, 这提高了它在无纹理和无特征环境中的鲁棒性。
– 但是,该系统没有考虑LIO系统的边缘化和时间戳同步的问题。 -
Super Odometry 使用带有IMU作为主要传感器的LVI系统,由三部分组成:IMU 里程表、VIO 和 LIO。
– VIO和LIO提供的观测数据可以约束IMU的偏差。
– 另一方面,受约束的IMU里程计提供了VIO和LIO的预测,以实现从粗到细的姿态估计。
– 同时扩展GPS和车轮里程计,对传感器退化具有鲁棒性。
-
基于滤波器的方法仅使用当前帧的传感器数据,并依赖于每个数据的时间同步。对于联合状态优化,许多方法使用 EKF 或 MSCKF 框架
– 由于不考虑历史数据对当前姿态的影响,计算量相对较小,可扩展性相对较好。 -
Tightly-coupled aided inertial navigation提出了一种具有点和平面特征的紧密耦合辅助惯性导航系统,这是一种适用于任何视觉和深度传感器。
– 使用 MSCKF 将来自 RGB-D 传感器、IMU 测量值和可视点特征的平面特征紧密耦合在 3.5 m 内。
– 为了限制状态向量的比例,系统线性边缘化了大部分点要素,并在状态向量中保留了一些具有平面增强约束的点要素作为 SLAM 要素。 -
LIC-Fusion 2.0 开发了一种基于滑动窗口滤波器的激光雷达惯性相机测程法,具有在线时空校准功能
– 新型的滑动窗口平面特征跟踪,用于高效处理3D LiDAR点云
– 在平面特征跟踪中提出了一种新的异常值拒绝准则,以实现高质量的数据关联,只有属于同一平面的跟踪平面点才会用于平面初始化 -
R2LIVE融合了来自LiDAR、惯性传感器和视觉相机的测量结果,以实现鲁棒而准确的状态估计
– 结合了基于误差状态的迭代卡尔曼滤波前端和基于因子图优化的滑动窗口优化的新步骤,以细化视觉姿态和地标估计
– 在室内、室外、隧道和高速运动等恶劣场景中实现了高精度和鲁棒性。这些方法速度快,计算成本低廉,但对时间同步很敏感。
| Year | Method | Strength | Problem |
|---|---|---|---|
| 2018 | LIMO | Point cloud scene segmentation to optimize depth estimation.Epipolar Constraint. Optimization PnP Solution | Unused LO.Sparse map. |
| 2019 | Tightly-coupled aided inertial navigation | MSCKF.Point and plane features. | LIDAR is unnecessary. |
| 2019 | LIC-Fusion | MSCKF.Point and Line Features. | High computational cost.Time synchronization is sensitive.Unresolved sensor degradation. |
| 2020 | LIC-Fusion 2.0 | MSCKF.Sliding window based plane feature tracking. | Time synchronization is sensitive.Unresolved sensor degradation. |
| 2020 | LIDAR-Monocular Visual Odometry | Reprojection error combined with ICP.Get depth of point and line features simultaneously. | Poor closed-loop detection performance.High computational cost. |
| 2021 | LIDAR-Monocular Surface Reconstruction | Match line features of point clouds and images.Calculate reprojection error for points and lines. | Inertial measurement not used. |
| 2021 | GR-Fusion | Factor graph optimization.Address sensor degradation.GNSS global constraints. | No apparent problem. |
| 2021 | Lvio-Fusion | Two-stage pose estimation.Factor graph optimization.Reinforcement learning adjusts factor weights. | High computational cost.Difficult to deploy. |
| 2021 | LVI-SAM | Factor graph optimization.VIS and LIS complement each other.Optimize depth information. | Poor closed loop performance. |
| 2021 | Super Odometry | IMU as the core.LIO and VIO operate independently.Jointly optimized pose results.Address sensor degradation. | High computational cost. |
| 2021 | Tightly Coupled LVI Odometry | Factor graph optimization.Unified feature representation.Efficient time synchronization. | Unresolved sensor degradation. |
| 2021 | DSP-SLAM | Add object reconstruction to factor graph.The DeepSDF network extracts objects. | No coupled inertial system.Poor closed loop performance. |
| 2021 | R2LIVE | The error-state iterated Kalman filter.Factor graph optimization. | No closed loop detection and overall backend optimization. |
性能评估
SLAM 数据集
-
评估 SLAM 算法的性能往往离不开开源数据集的帮助。用于3D激光雷达SLAM研究和应用的移动载体包括无人驾驶车辆、无人船和无人机。
-
户外场景的数据采集复杂繁琐,涉及时间同步、坐标校准和各种传感器之间的校准。公共数据集节省了算法研究的数据准备时间。提供的序列和基准框架也有助于算法开发。
-
目前该领域基于激光雷达的公共数据集包括:
– KITTI 数据集,是目前国际上最大的自动驾驶场景评价数据集,也是学术界最常用的数据集。
– Waymo 数据集,是自动驾驶公司Waymo的数据开放项目。
– PandaSet 数据集,用于开发复杂环境和极端天气下安全可控的自动驾驶技术。
– Oxford Robotcar,是牛津大学机器人实验室提出的公共数据集。
– UrbanNav,包括复杂而动态的城市道路环境和封闭的隧道环境。它还提供了GNSS系统的真实姿势作为参考。与常用的KITTI数据集相比,UrbanNav数据集的采集环境更接近无人驾驶的复杂环境。
性能比较
- SLAM算法的评估主要基于定位精度的评估。
– 相对姿势误差(RPE)用于描述由特定时间差分隔的两帧之间的姿态差异的精度。真实姿势和估计姿势的变化是在同一时间间隔内计算的。然后,计算两者之间的差值以获得相对姿势误差。
– 均方根误差(RMSE)计算每个时间段的相对姿势误差,以获得整体值。
– 绝对轨迹误差(ATE)描述了估计姿态与真实姿态的直接差异,可以直观地反映算法的准确性和轨迹的全局一致性。 许多SLAM算法和综述论文在实验部分使用数据集分析了开源算法的性能。
评论区