



相机校准参数的获得(camera_calibration )
rosrun camera_calibration cameracalibrator.py --size 8x6 --square 0.108 --k 6 image:=/my_camera/image
** 这里有很多棋盘,分享给大家~ Link
- –size 8x6:棋盘大小为 8x6,仅计算内角
- –square 0.024:棋盘中的一个正方形大小,以米为单位
- –k 6:要使用的径向失真系数的数量(最多6,默认 2)
- image:= 相机发布的图片主题名
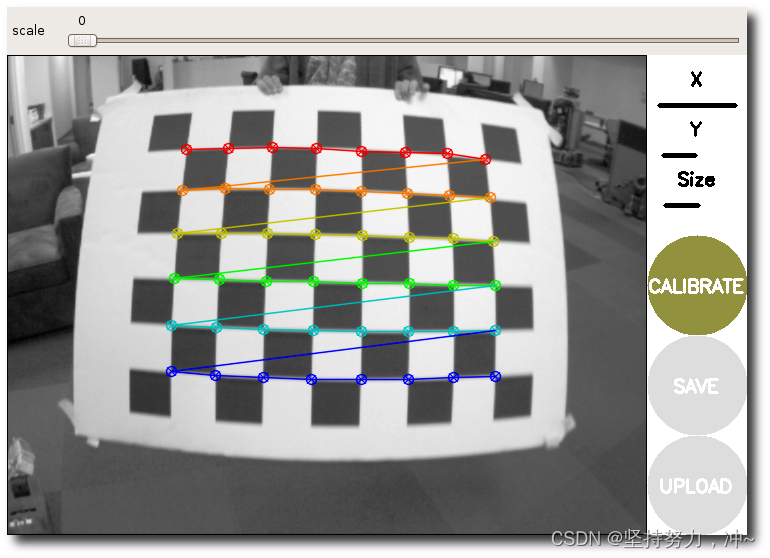
运行后订阅 ROS 原始图像主题,并提供一个校准窗口。校准窗口显示来自相机的当前图像,突出显示棋盘格,并记录校准数据,当数据足够时按下校准按钮(否则是灰色的),节点计算相机校准参数。当用户单击COMMIT 时,节点使用服务调用将这些新的校准参数上传到相机驱动程序。
输出的相机校准参数如下:
**** Calibrating ****
mono pinhole calibration...
D = [14.565826177152536, 10.477393040343149, 1.6097304996818903e-05, -0.0038758664891502346, -21.615524616819467, 14.51314595032321, 9.0117176329534, -20.246159366771483]
K = [622.7139809471598, 0.0, 632.8545193623008, 0.0, 625.5215201440889, 369.59461579516187, 0.0, 0.0, 1.0]
R = [1.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 1.0]
P = [666.8020629882812, 0.0, 618.1466074989657, 0.0, 0.0, 662.8768310546875, 369.8623347548855, 0.0, 0.0, 0.0, 1.0, 0.0]
None
# oST version 5.0 parameters
[image]
width
1280
height
720
[narrow_stereo]
camera matrix
622.713981 0.000000 632.854519
0.000000 625.521520 369.594616
0.000000 0.000000 1.000000
distortion
14.565826 10.477393 0.000016 -0.003876 -21.615525 14.513146 9.011718 -20.246159
rectification
1.000000 0.000000 0.000000
0.000000 1.000000 0.000000
0.000000 0.000000 1.000000
projection
666.802063 0.000000 618.146607 0.000000
0.000000 662.876831 369.862335 0.000000
0.000000 0.000000 1.000000 0.000000
*参考网站链接:link
参数分析
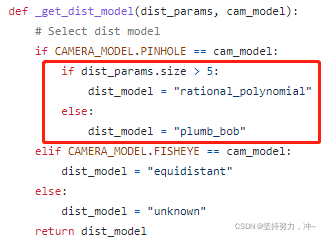
失真模型
对于针孔型相机,失真模型分为为plumb_bob和rational_polynomial,具体取决于使用的径向畸变参数K的数量,当K为6时是rational_polynomial模型,其他则为plumb_bob。
D、K、R、P参数
在完成校正后我们得到D、K、R、P参数矩阵。
D参数:相机的失真系数,属于相机的内在参数,它最少可以是4个参数,最多为8个。其中,k1, k2, k3, k4, k5, 和 k6是径向畸变系数。 p1是切 p2向畸变系数。具体推导过程:link
K参数:为相机矩阵,cx, cy是通常位于图像中心的主点,fx, fy是以像素为单位表示的焦距。
R参数:通常为单位矩阵,如果需要旋转也可以加。
P参数:冗余信息,在普通单目中可以直接由K形成
利用校准参数校正图像(image_proc)
<!-- 生成一个 image_proc/rectify nodelet 来校正 RGB 图像 -->
<node pkg="nodelet" type="nodelet" name="rectify_rgb_1"
args="load image_proc/rectify manager_1 --no-bond"
respawn="true">
<!-- image_mono:未矫正的的图像 image_rect经过校正后的图像 -->
<remap from="image_mono" to="rgb_to_depth/image_raw" />
<param name="interpolation" value="0" />
<param name="queue_size" value="2" />
<remap from="camera_info" to="rgb_to_depth/camera_info" />
<remap from="image_rect" to="rgb_to_depth/image_rect" />
</node>
通过获取未校正的图像流及其相关的校准参数,并生成校正后的图像。
*参考网站链接:link
校正过程,重点!!!
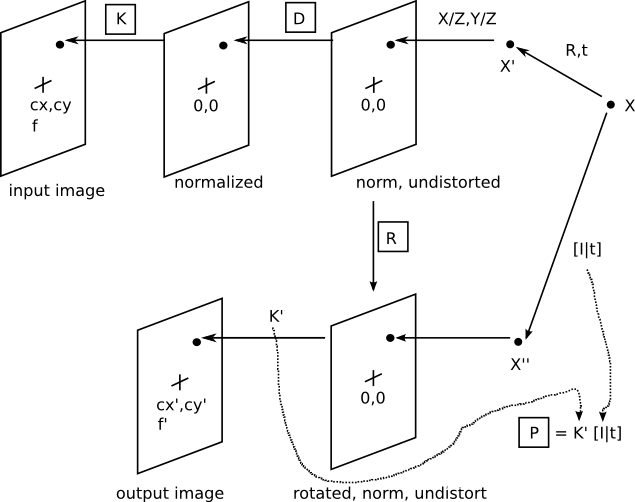
- 我们先看上面一行的原图转化过程:首先对于空间中的一点X,通过Rt矩阵与投影操作(除以Z)将点投影到标准化的未失真图像上,而每一个相机实际上都存在镜片畸变,假设其畸变矩阵为D,并将点移动到其失真位置,目前仍然在归一化图像中。最后,通过将相机矩阵应用于每个图像点,将归一化图像转换为像素坐标图像,这也就是我们所得到的相机原图。
- 校正过程则是为了去掉畸变影响,首先对原图KD的逆变化得到标准化的未失真图像,旋转R是单位矩阵,因为我们不想旋转归一化的未失真图像。然后K’转换到未畸变的输出图像中的像素坐标,由于不需要在图像平面内平移或从原始图像缩放,所以直接使用K = K’(我们也可以用camera_calibration进行单目校准获得的优化过的K来映射更好)。
*参考网站链接:link
评论区